

Small unmanned aerial vehicle MARG heading and attitude estimation method based on adaptive EKF algorithm
A small unmanned aerial vehicle, self-adaptive technology, applied in the field of integrated navigation, can solve problems such as slow error convergence speed, decreased attitude angle accuracy, and spin
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
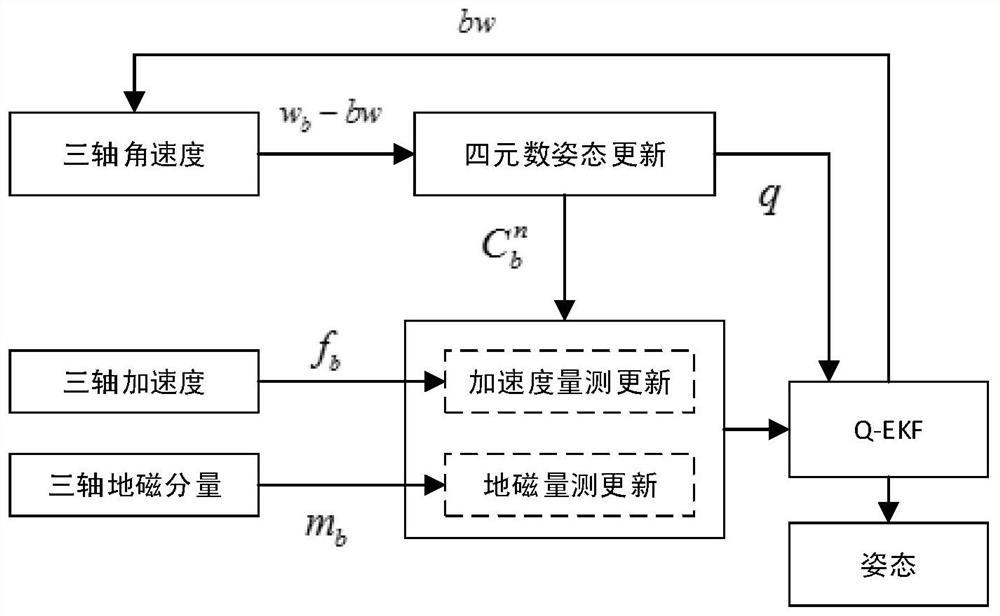
[0080] The invention provides a method for estimating the attitude of a small unmanned aerial vehicle (MARG) based on an adaptive EKF algorithm, and the attitude estimation is performed based on a sensor measurement model of the MARG. The extended Kalman filter algorithm (QuaternionExtended Kalman Filter, Q-EKF) of quaternion is adopted, and the Q-EKF filter is improved. First, the magnetometer and accelerometer measurement updates are performed separately, and the magnetometer error evaluation is added. When the magnetometer error is large, the magnetometer error can be isolated to avoid interference to the horizontal attitude estimation. Secondly, the present invention proposes an adaptive filtering algorithm for ext...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More