

Construction method, system and device for constructing external rectangular frame of obstacle point cloud
A technology of circumscribed rectangles and construction methods, which is applied in graphics and image conversion, image data processing, instruments, etc., can solve problems such as the instability of stippling frame methods, and achieve good real-time performance, small amount of calculation, and good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
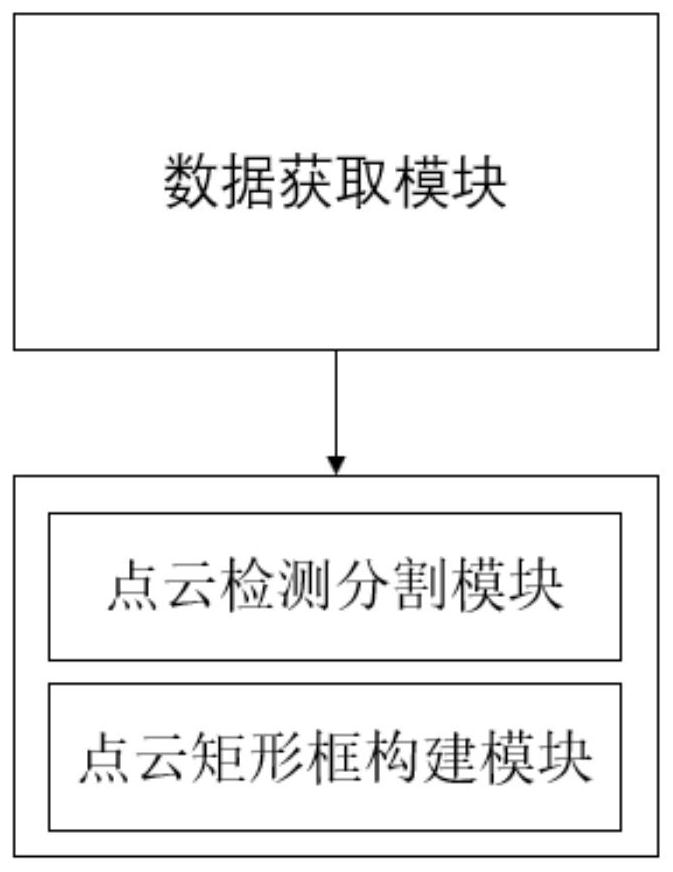
[0037] The device described in the present invention is as figure 1 As shown, it includes a data acquisition module and an information processing module, wherein the information processing module includes a point cloud detection and segmentation module and a point cloud rectangular frame building module. In the present invention, the frame fitting module is mainly innovated.
[0038] The present invention proposes a system for constructing a rectangular frame bounded by a point cloud of an obstacle, including:
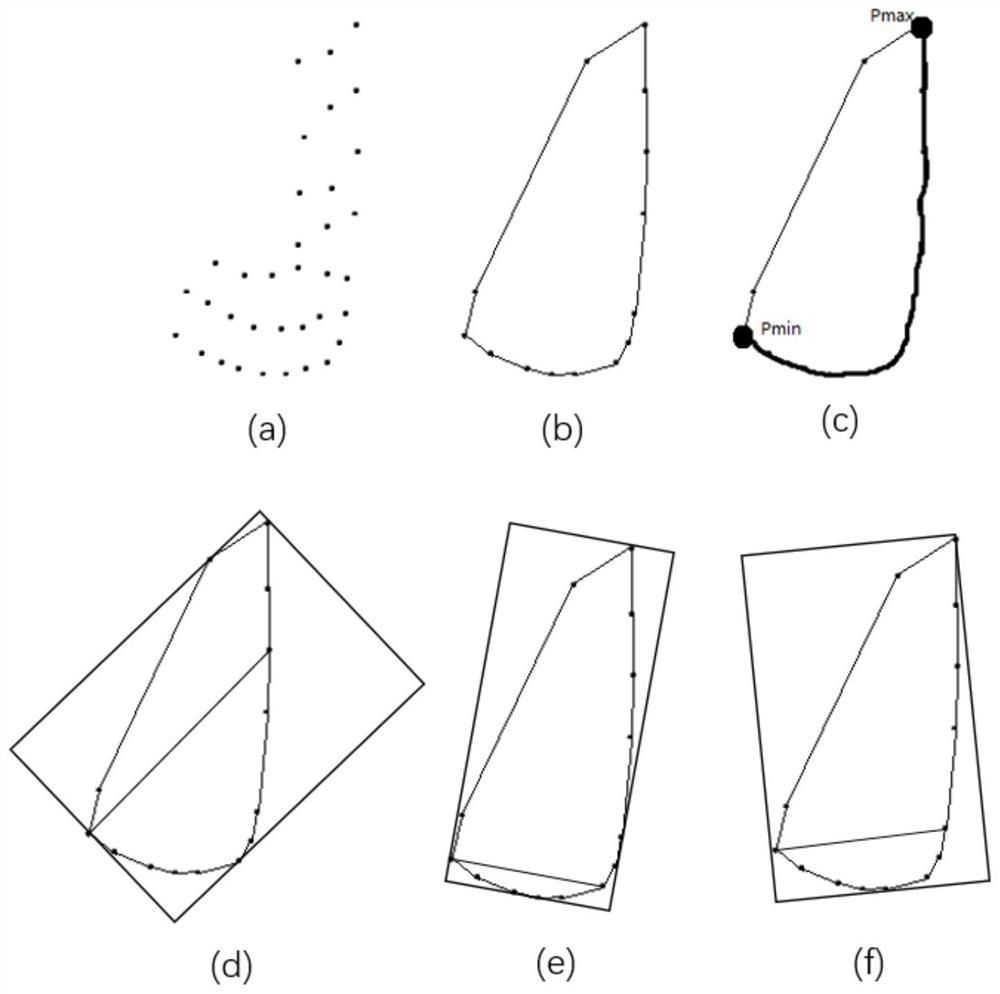
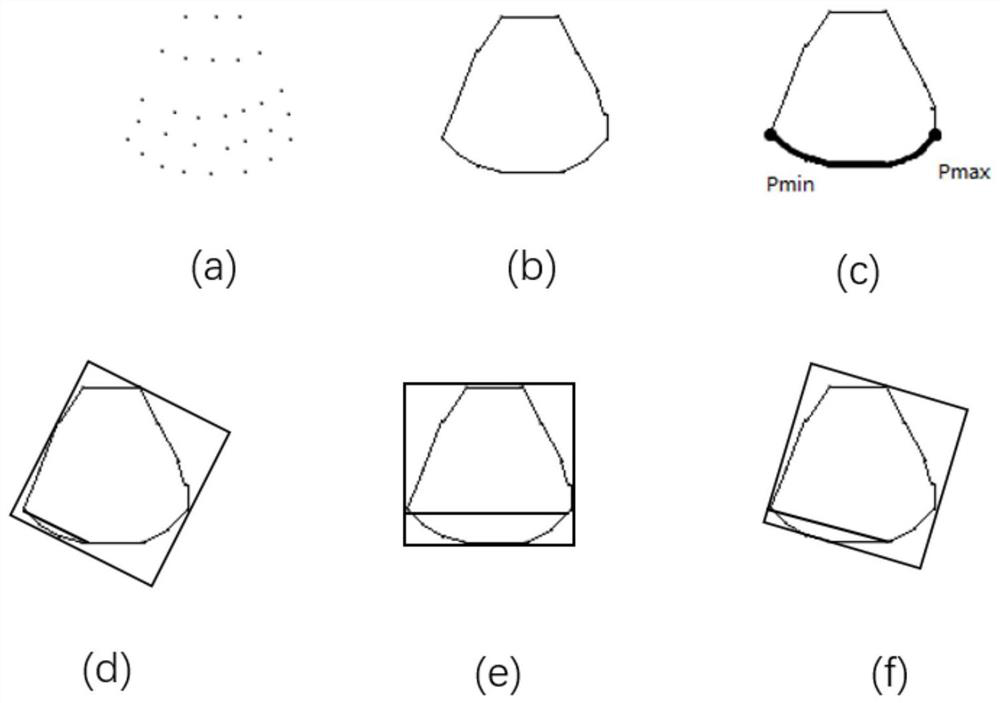
[0039] The circumconvex polygon building block is used to project the obtained obstacle point cloud onto a two-dimensional plane using a top view projection method, draw a circumscribed convex polygon to the obstacle point convex hull algorithm, and obtain the convex polygon angle set of points;
[0040] The polygon corner point selection module reduces the set of convex polygon corner points, and selects points close to the coordinate center to form a set of center ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More