

Cleaning robot and control method thereof
A cleaning robot and control method technology, applied in the field of intelligent robot control, can solve problems such as wasting electric energy, prolonging cleaning time, and reducing user experience, and achieve the effect of improving accuracy and cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
[0084] As an example 1: the closed area in the target image is identified according to the contour detection method.
[0085] Specifically, the target image is binarized to obtain a binarized image, and then contour detection is used to obtain a closed area in the binarized image.
example 2
[0086] As a second example: the closed area in the target image is identified according to the way of speckle detection, so as to identify the closed area formed by the small dirty area.
[0087]Specifically, the speckle detection method: preset a pixel threshold range, and set the threshold step; then select a series of pixel thresholds within the pixel threshold range according to the threshold step; then obtain the target A binarized image of the image; find all the spots in each of the binarized images; finally integrate all the spots in all the binarized images to obtain all closed areas in the target image.
[0088] Wherein, the pixel threshold range and the threshold step can be any feasible data interval, and those skilled in the art can determine the specific data of the pixel threshold range and the threshold step through multiple experiments.
[0089] Taking the acquired target image as a color image as an example, the speckle detection is described in detail:
[0...
example 3
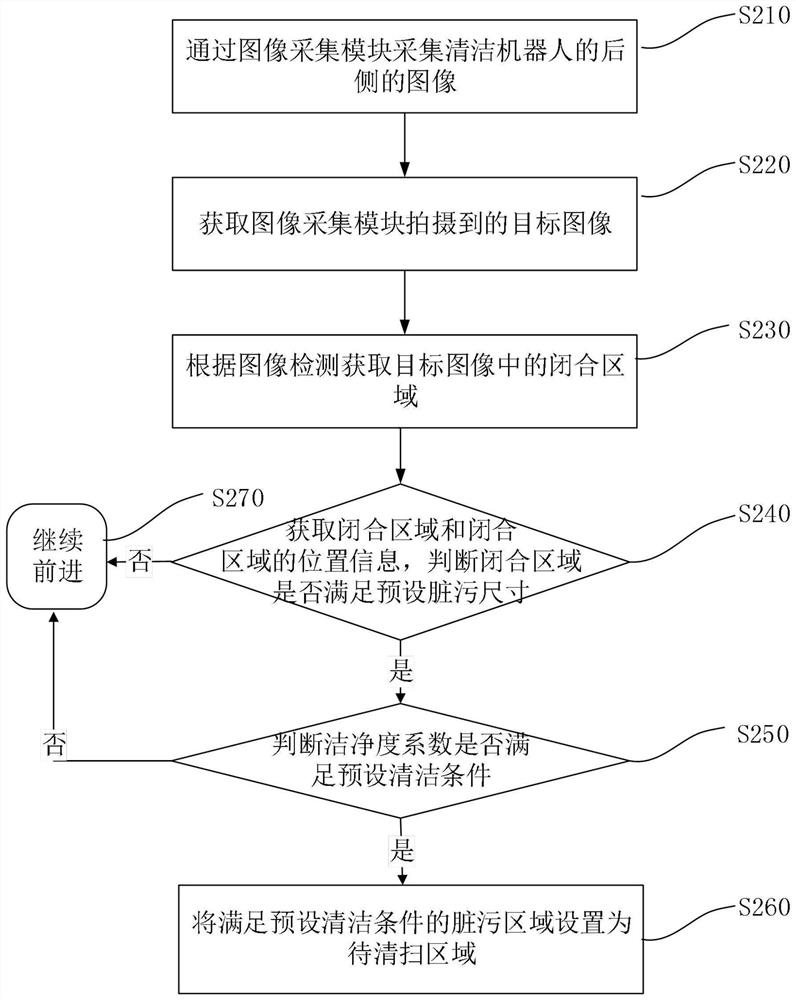
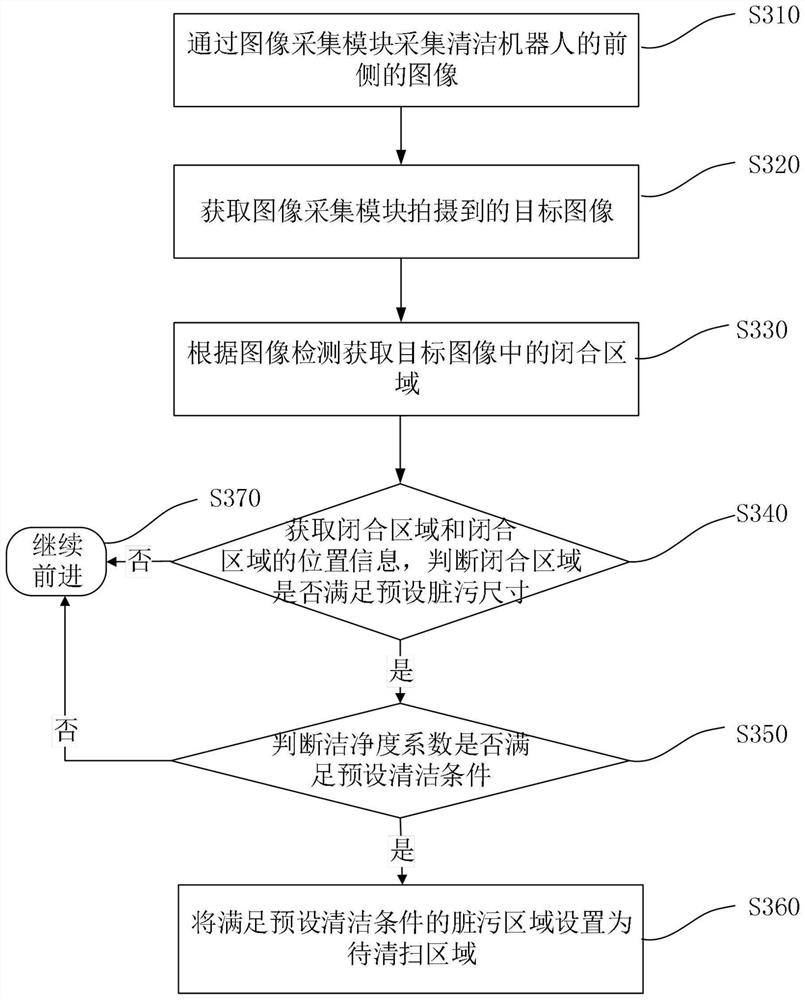
[0102] As a third example: if the area of the closed area is greater than the area threshold, it is determined that the closed area is a dirty area, otherwise it is determined that the area is not a dirty area.
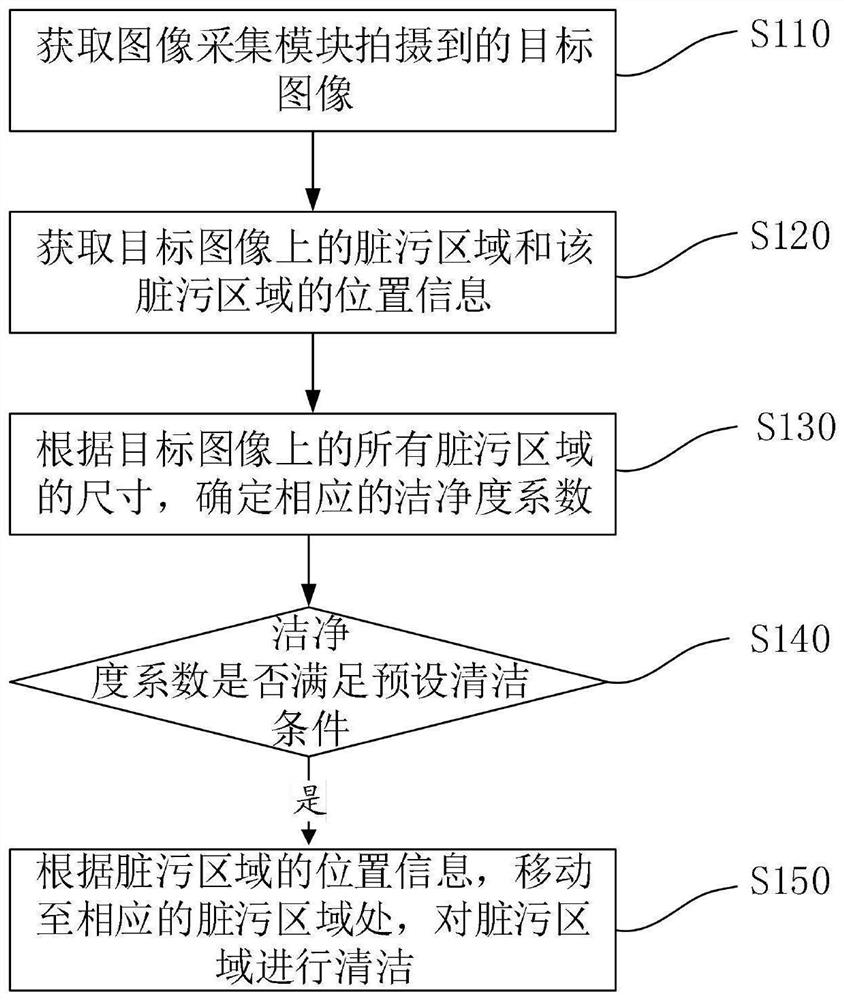
[0103] Step S250, judging whether the cleanliness factor satisfies a preset cleaning condition.
[0104] Among them, the cleanliness coefficient represents the corresponding parameter after integrating all the dirty areas on the target image, and is used to indicate whether the ground is clean or not.
[0105] Specifically, according to the formula Calculate the cleanliness coefficient, where a represents the cleanliness coefficient, n represents the number of all effective dirty areas in the target image, and G i Indicates the area of the i-th effective dirty area in the target image, and S indicates the scaling resolution. Among them, the larger the cleanliness coefficient, the more obvious the dirty area.
[0106] Specifically, the preset cleaning condition...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More