

Grabbing arm type trash cleaning robot motion control system
A technology of robot motion and control system, applied in the direction of program control manipulator, manipulator, manufacturing tool, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
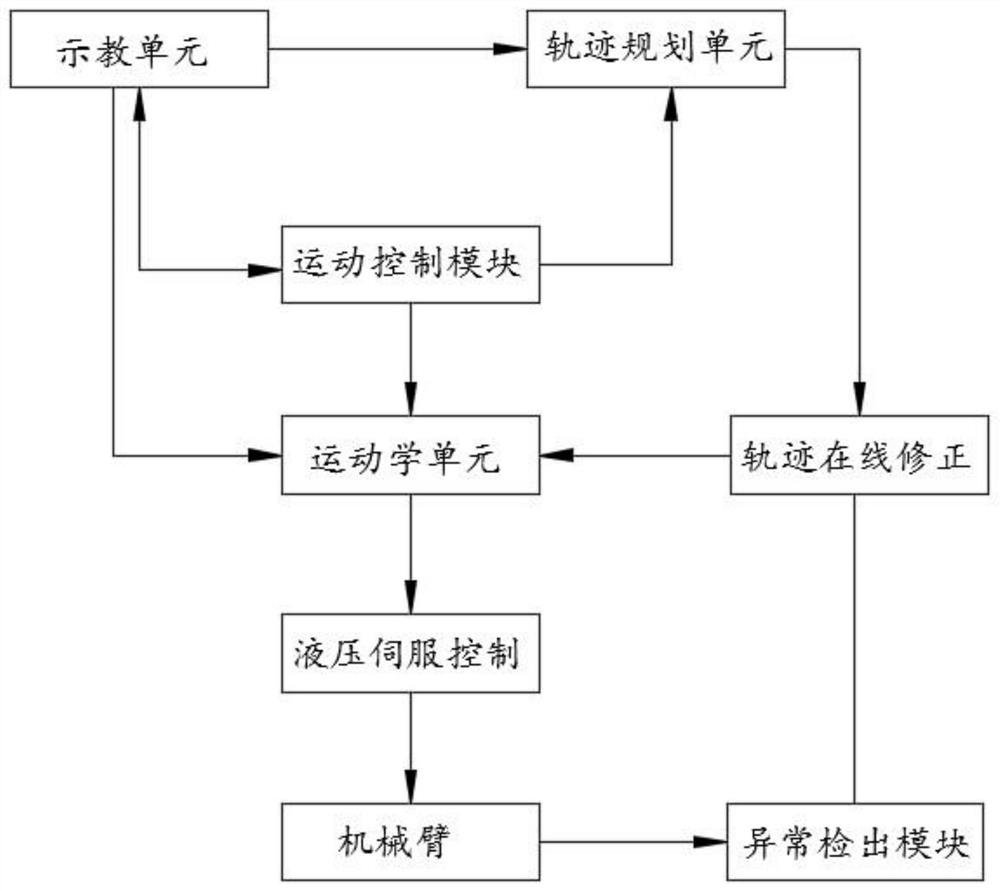
[0064] see figure 1 , a motion control system of an arm-grabbing cleaning robot, comprising a database management module, a motion control module, an operation module, an abnormality detection module, and a data acquisition module; the motion control module includes a data storage unit, a trajectory planning unit, a kinematics unit, communication unit, teaching unit, safety management unit and human-computer interaction unit;
[0065] The trajectory planning unit is used to plan the spatial trajectory of the grabbing arm t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More