Three-dimensional tracking registration method for augmented reality
A 3D tracking and augmented reality technology, applied in image enhancement, image data processing, instruments, etc., can solve the problems of low registration accuracy and long registration time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
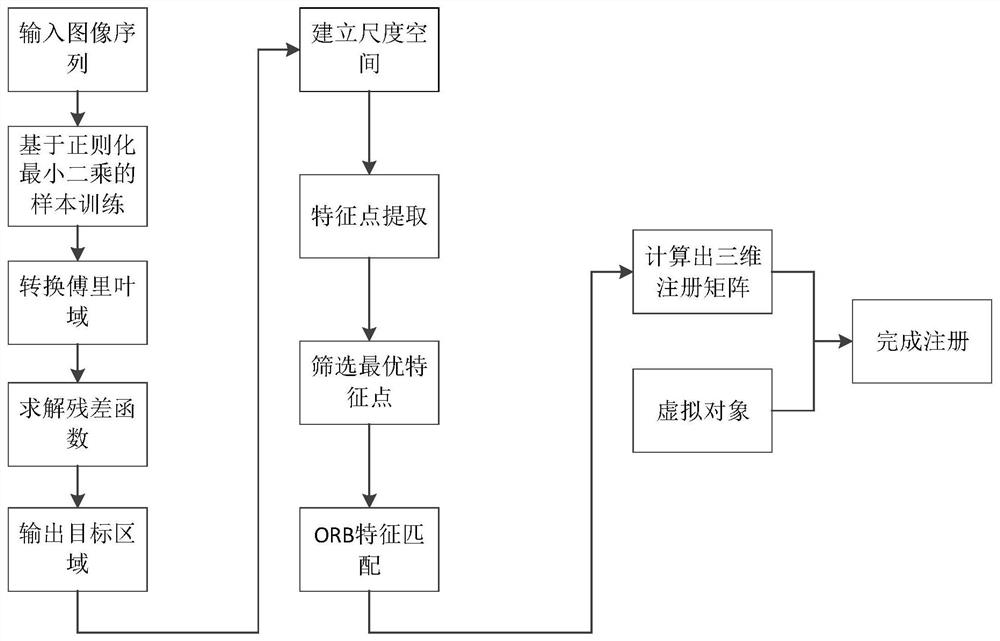
[0057] This embodiment provides an augmented reality-oriented three-dimensional tracking registration method, the method comprising:
[0058] Step 1: Use KCF for target tracking to obtain the target position in the current image frame;
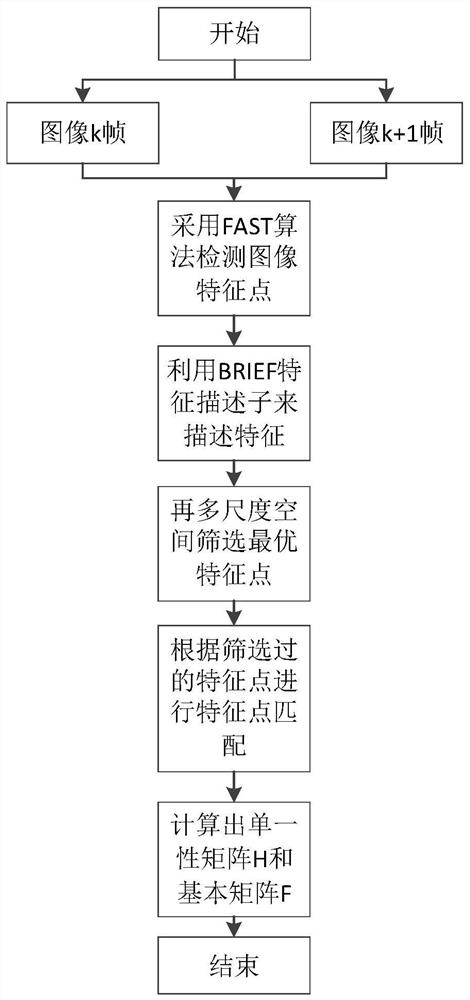
[0059] Step 2: Perform feature extraction on the current image frame and filter the extracted features;
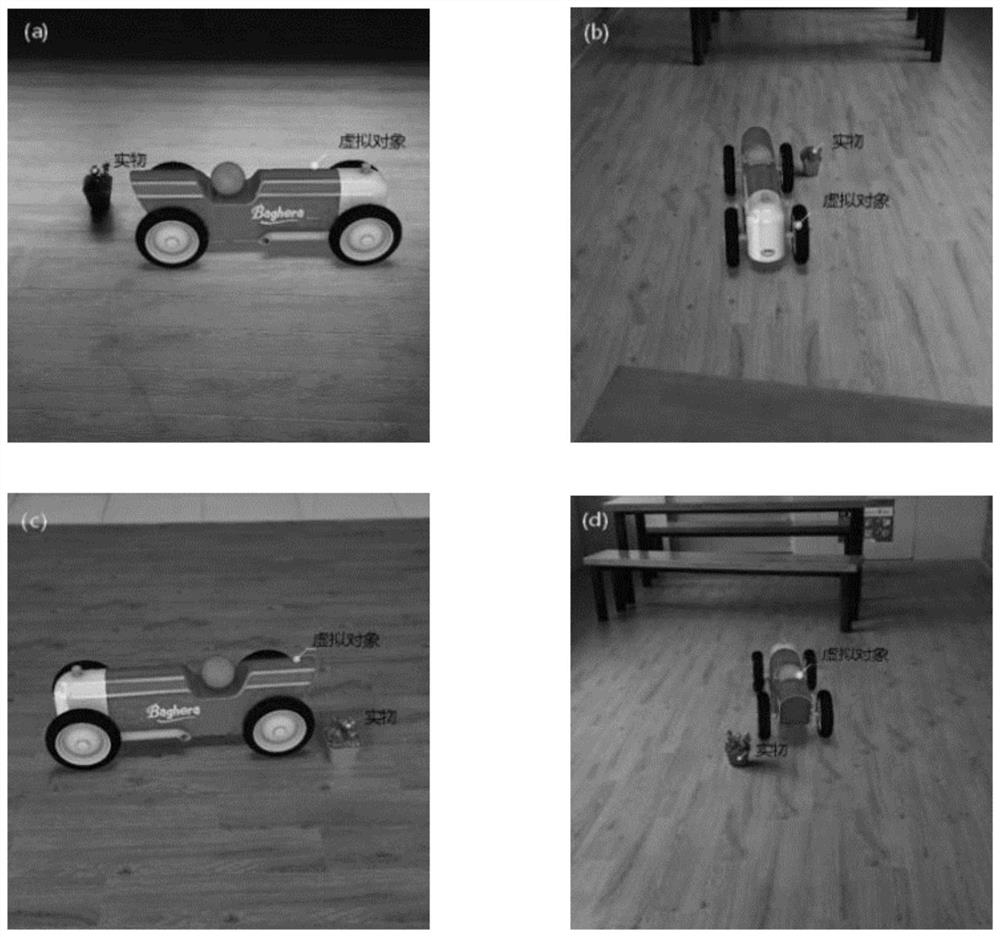
[0060] Step 3: Solve the camera pose change matrix according to the feature point matching results filtered by two adjacent frames of images; obtain the virtual object coordinates, camera coordinates and real-world coordinate transformation relationship according to the camera pose change matrix, and register the virtual object to the real world in the image.
[0061] In this embodiment, the improved ORB algorithm is used to detect the tracked target location area to be registered, and the Gaussian kernel function convolution is used to solve the extreme points for screening in the multi-scale space, and finally the target area is detecte...
Embodiment 2
[0063] This embodiment provides a three-dimensional tracking registration method for augmented reality, see figure 1 , when performing ORB feature matching, the method proposes a feature point screening mechanism according to the multi-scale space theory, uses Gaussian kernel function convolution to solve extreme points in multi-scale space, and selects local extreme points as candidate ORB feature points in scale space , these extreme points are evenly distributed and have scale invariance, and finally complete the tracking and registration according to these filtered feature points, which has certain advantages in time and accuracy.
[0064] Specifically, the method includes:
[0065] Step 1 KCF target tracking
[0066] KCF is a target tracking method. First, train a target detector based on the least squares classifier; then, use the target detector to obtain the approximate area of the target in the next frame; finally, use the current frame detection result as a new sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com