

Finite time stability control method and system for flexible single-chain mechanical arm
A stable control method and finite time technology, applied in the field of manipulator engineering, can solve the problems of complexity explosion, research results that do not take into account the finite time problem, increased calculation burden, etc., to achieve accurate sinking time, improve control accuracy and calculation The effect of improving efficiency and improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
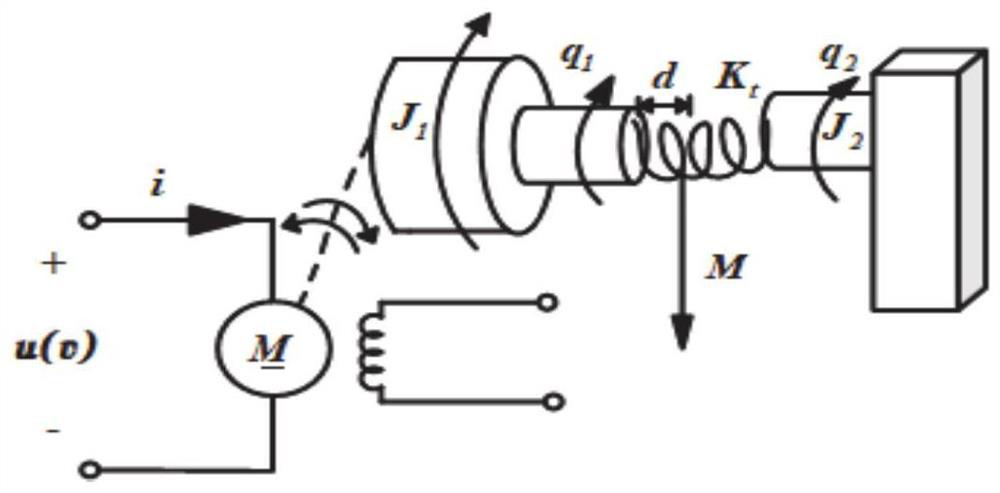
[0037] In one or more embodiments, a finite-time stable control method of a flexible single-chain robotic arm is disclosed, including the following steps:
[0038] (1) Determine the dynamic equation of the flexible single-chain manipulator;
[0039] (2) carry out coordinate transformation to described kinetic equation, described kinetic equation is converted into the fifth-order non-strict feedback form;
[0040] (3) Using the backstepping method and command filtering technology, design a virtual controller for each step, and introduce a compensation signal to reduce the error caused by command filtering, and finally obtain an adaptive finite-time controller for the flexible single-chain manipulator;
[0041] (4) Control the flexible single-chain robotic arm based on the controller.
[0042] The implementation process of the finite-time stable control method for the flexible single-chain manipulator of this embodiment will be described in detail below.
[0043] Schematic dia...
Embodiment 2
[0237] In one or more embodiments, a finite-time stability control system for a flexible single-chain manipulator is disclosed, comprising:
[0238] A module for determining the kinetic equations of a flexible single-chain manipulator;
[0239] A module for performing coordinate transformation on the dynamic equation and converting the kinetic equation into a fifth-order non-strict feedback form;
[0240] It is used to design the virtual controller of each step by using the backstepping method and command filtering technology, and at the same time introduce the compensation signal to reduce the error caused by the command filtering, and finally obtain the module of the adaptive finite-time controller of the flexible single-chain manipulator;
[0241] A module for controlling a flexible single-chain robotic arm based on the controller.
[0242] It should be noted that the specific working methods of the above modules are realized by the method disclosed in Embodiment 1, and de...
Embodiment 3
[0244] In one or more embodiments, a terminal device is disclosed, including a server, the server includes a memory, a processor, and a computer program stored on the memory and operable on the processor, and the processor executes the The program realizes the finite-time stable control method of the flexible single-chain manipulator in the first embodiment. For the sake of brevity, details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More