Closed-loop detection method based on local and convolutional neural network features
A convolutional neural network and closed-loop detection technology, which is applied in biological neural network models, neural architectures, computer components, etc., to achieve the effect of strong generalization ability, small memory footprint, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
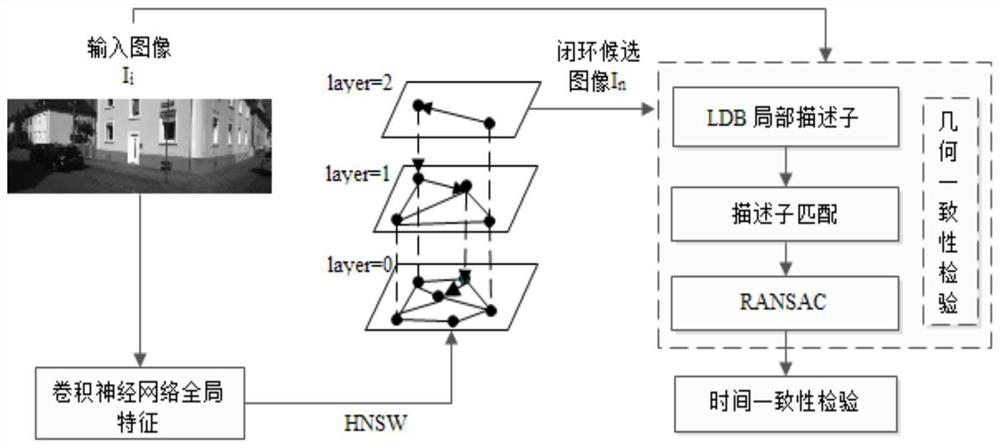
[0043] Such as Figure 1-2 Shown is an embodiment of a closed-loop detection method based on local and convolutional neural network features, including the following steps:
[0044] Step 1: The current input image I collected by the mobile robot i Perform preprocessing and resize the image to 224×224 pixels. The convolutional neural network VGG16 is used to extract the global features of the current input image. The VGG16 network is pre-trained by the Places365-standard dataset, and the output of the penultimate fully connected layer of the network will be used as the image I i The global feature f glo,i , the dimensionality of the image global feature is 4096. The extracted global features are gradually inserted into the hierarchical navigable small world map (HNSW) of the approximate nearest neighbor search algorithm;
[0045] Step 2: Within the retrieval range of the current input image, search through HNSW and the current input image I i The most similar image is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More