

Ship target 6D pose estimation method based on point cloud data
A point cloud data, pose estimation technology, applied in the field of deep learning and neural network, can solve time-consuming problems, achieve the effect of enhancing perception accuracy and improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0050] 1. Make a data set containing the target category, the three-dimensional coordinates of the target, the three-dimensional size of the target, and the three-dimensional pose of the target, that is, the three angles of the ship target's corresponding yaw angle, roll angle, and pitch angle for training.
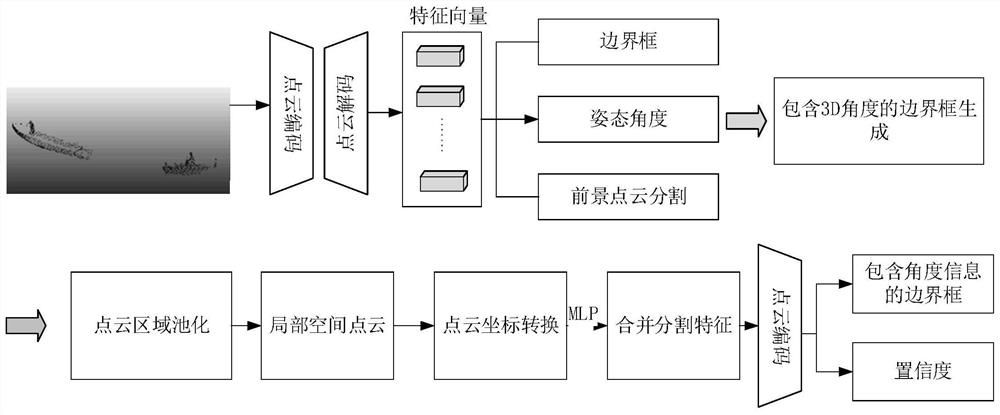
[0051] 2. Build a neural network.
[0052] The backbone network uses PointNet++ for point-by-point point cloud feature extraction. The feature extraction of point sets consists of three parts, namely Sampling layer, Grouping layer, and Pointnet layer. The sampling algorithm of the sampling layer uses the iterative farthest point sampling method iterative farthest point sampling (FPS). A series of points are selected in the input point cloud, thereby defining the center of the local region. Then build a local neighborhood, find points within a given distance, then use a fully connected layer for feature extraction, and finally perform a pooling operation to obtain advanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More