

Singular position avoidance method, system and device, and computer readable storage medium
A singular position and singular area technology, applied in the field of systems, singular position avoidance methods, equipment and computer-readable storage media, can solve the problems that the tracking accuracy of the robot end cannot be guaranteed, and the calculation amount is relatively large, so as to achieve good real-time performance, Trajectory accuracy without deceleration, guaranteed limited effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
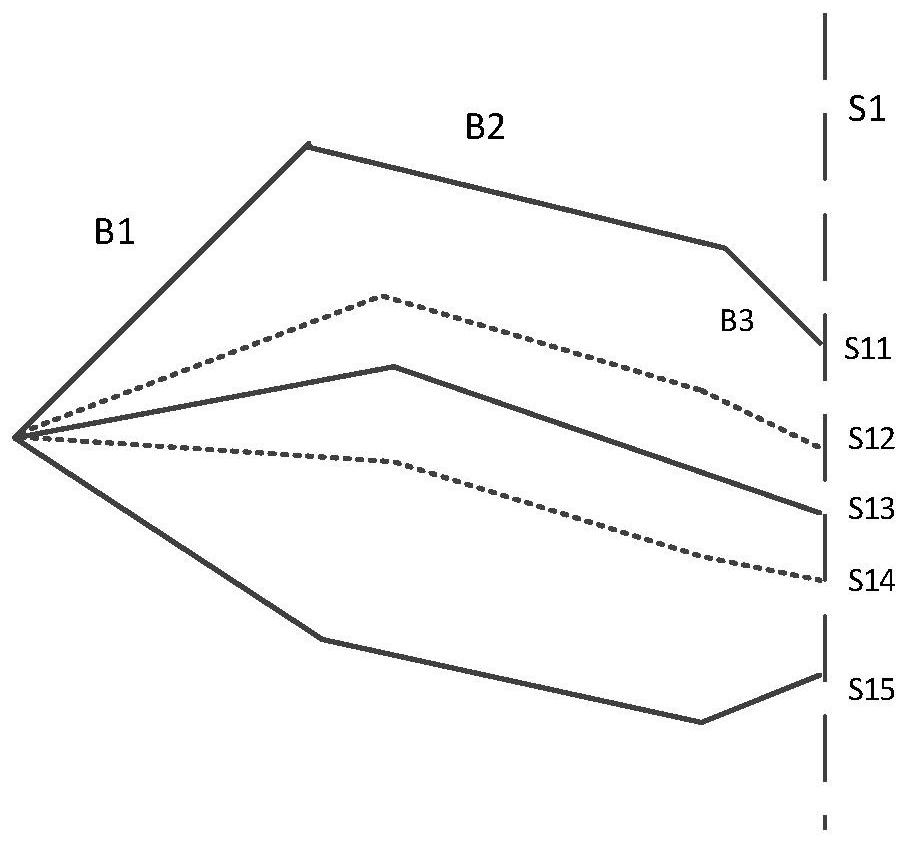
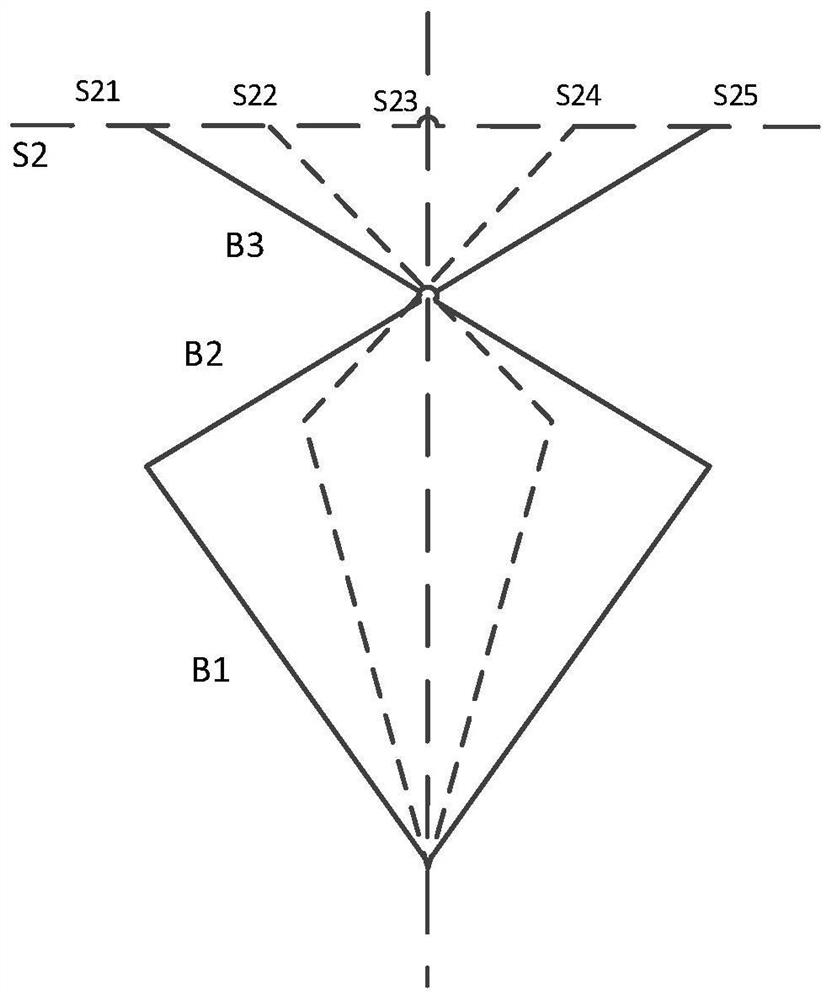
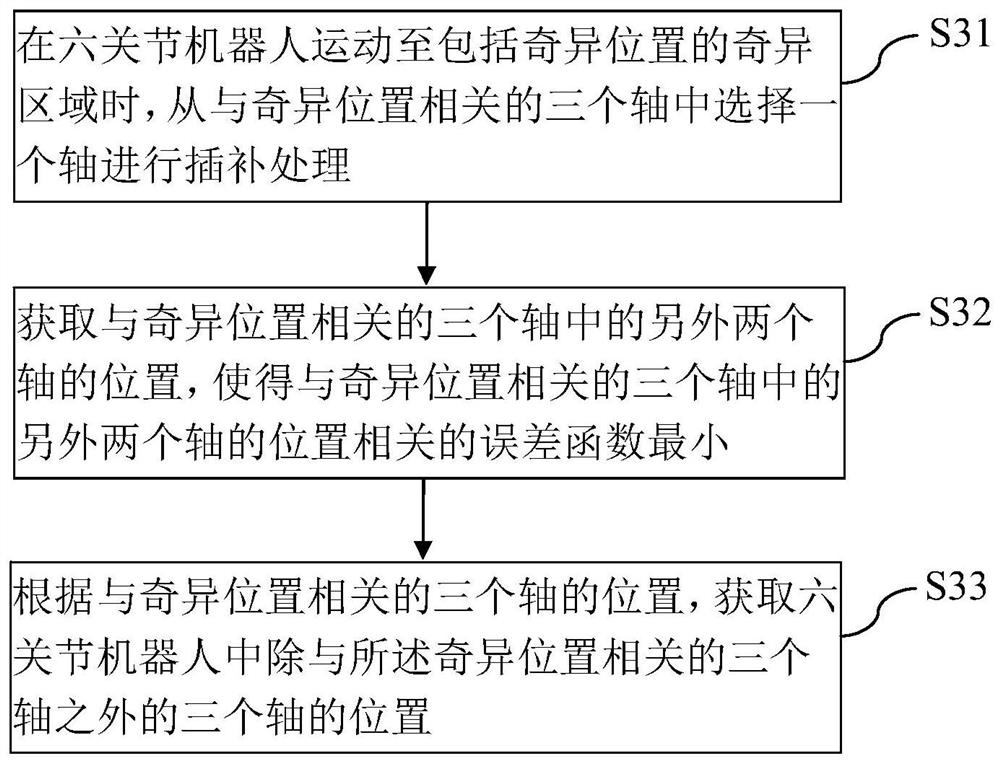
[0054] Such as image 3 As shown, it is a schematic flowchart of the singular position avoidance method provided by the embodiment of the present invention. The singular position avoidance method can be applied to a six-joint robot, and controls the six-joint robot to move from the starting point of the trajectory across the singular position to the end point of the trajectory. The above-mentioned six-joint robot includes three arms, that is, the first arm B1, the second arm B2, and the third arm B3, and the wrist is located at the end of the third arm B3. The above trajectory is a Cartesian space...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More