

Master-slave surgical robot trajectory prediction control method
A surgical robot and trajectory prediction technology, applied in surgical manipulators, surgical robots, design optimization/simulation, etc., can solve the problems of delay and low precision at the end of master-slave surgical robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0137] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
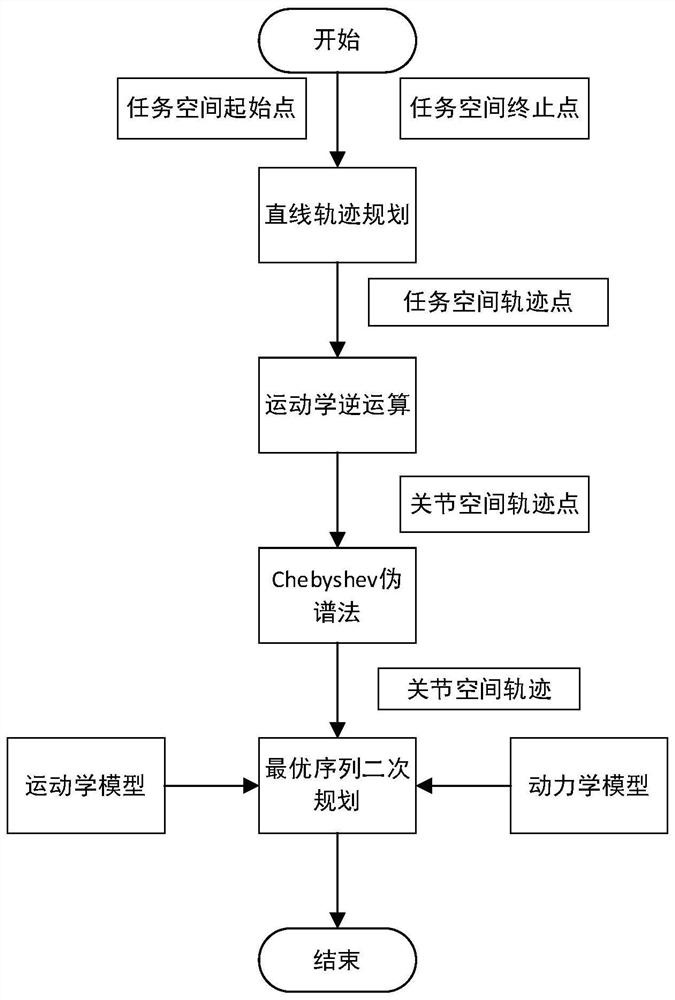
[0138] A master-slave surgical robot trajectory prediction control method of the present invention, such as figure 1 As shown, the specific steps are as follows:
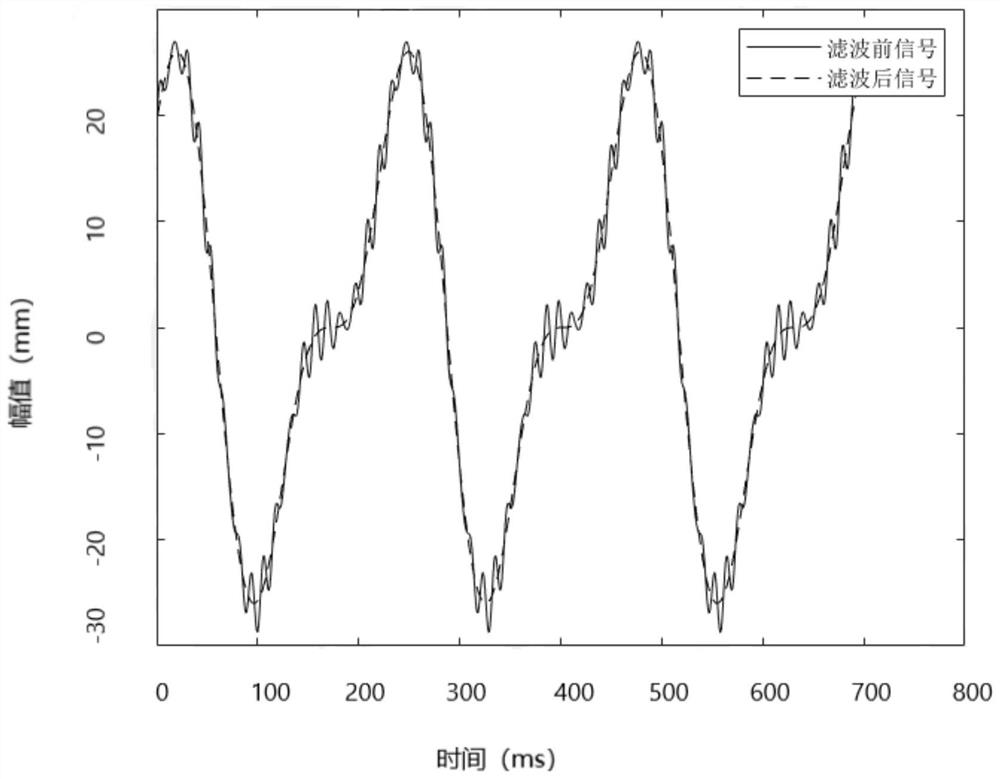
[0139] Step 1, design the least squares support vector machine Kalman vibration filter algorithm, filter the tremor signal of the hand, and obtain the target trajectory signal;
[0140] Step 2: Carry out trajectory planning on the target trajectory signal through the straight line trajectory planning method and the Chebyshev pseudospectral method respectively to obtain the planned trajectory, and optimize the planned trajectory through the quadratic programming method to obtain the actual trajectory signal;
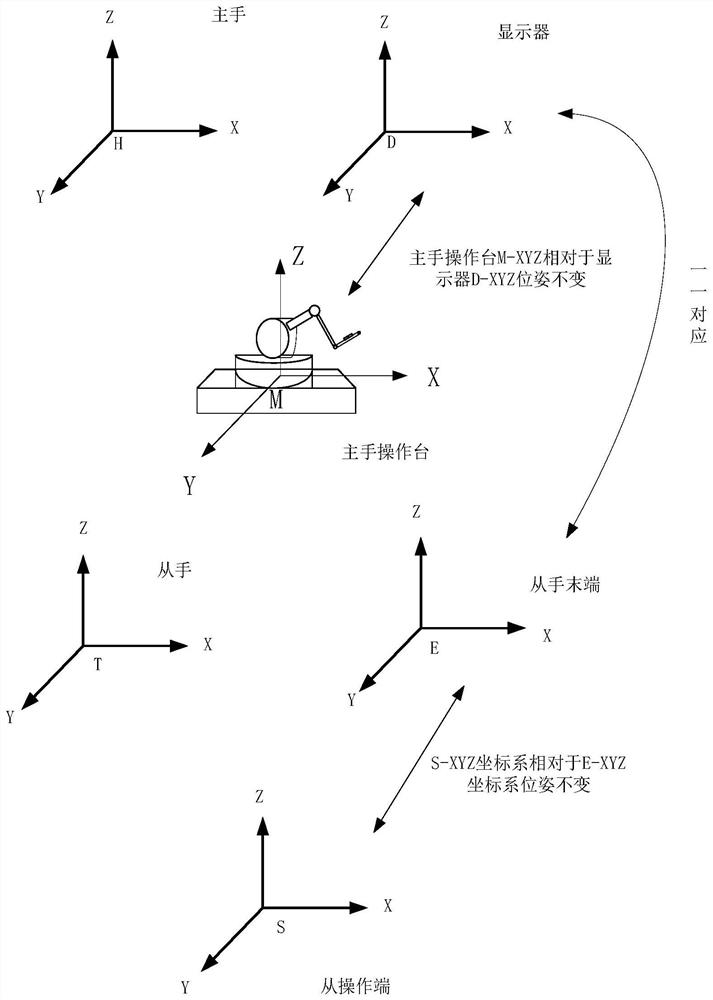
[0141] In step 3, the actual trajectory signal is used as input through the master-slave pose mapping function to map the motion poses of the master and slave hands, and real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More