

Mobile robot navigation method based on imitation learning and deep reinforcement learning
A technology for mobile robots and reinforcement learning, applied in neural learning methods, two-dimensional position/lane control, instruments, etc., can solve problems such as learning efficiency and performance degradation, training performance cannot exceed demonstration experience, etc., to reduce dependence and improve The effect of learning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
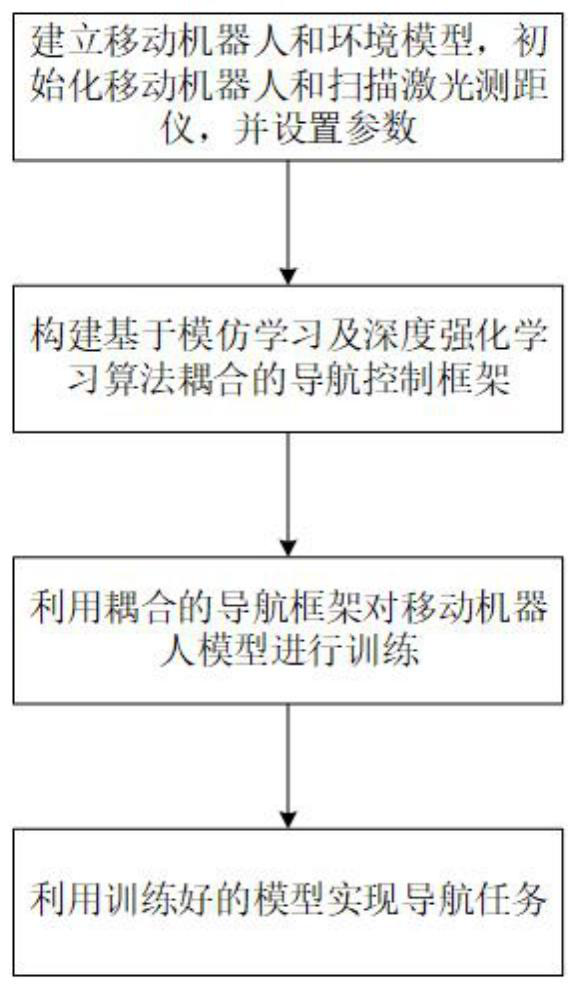
[0031] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The embodiment of the present invention provides a mobile robot mapless navigation method based on the coupling framework of imitation learning and deep reinforcement learning, such as figure 1 As shown, it mainly includes the following steps:
[0032] Step S100 establishes the mobile robot and the environment model, initializes the mobile robot and the scanning laser rangefinder, and sets parameters;
[0033] Step S101, using the Ubuntu kinetic operating system, the ROS operating platform and its integrated dynamics simulation software Gazebo as the simulation training environment, arrange the training environment as a square area of 20×20m, the obstacles are regularly placed cylindrical pillars, and the mobile robot Learning a map-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More