

A three-arm high-voltage line walking robot
A technology of walking robots and high-voltage lines, which is applied in the field of line inspection robots, can solve problems such as increased instability and power consumption, large overall weight, and poor stress conditions, and achieves the effects of simple structure, fast walking, and balanced force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
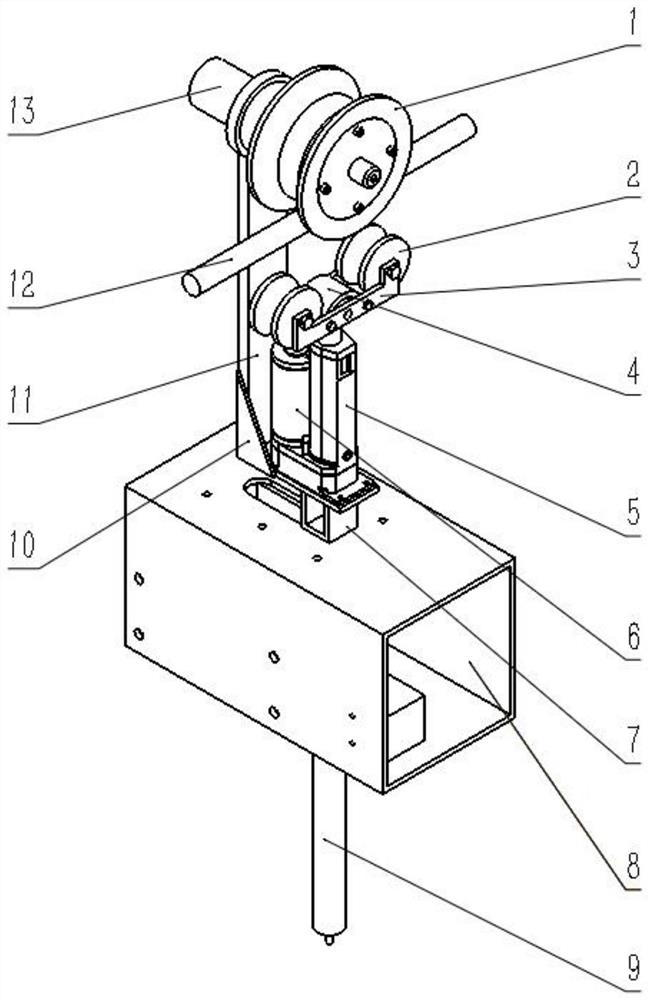
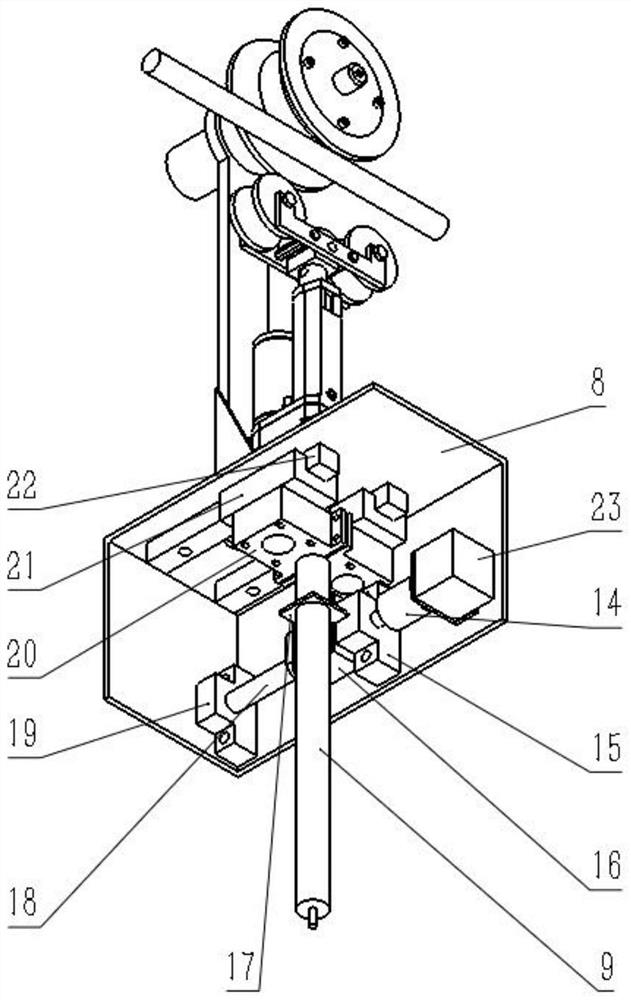
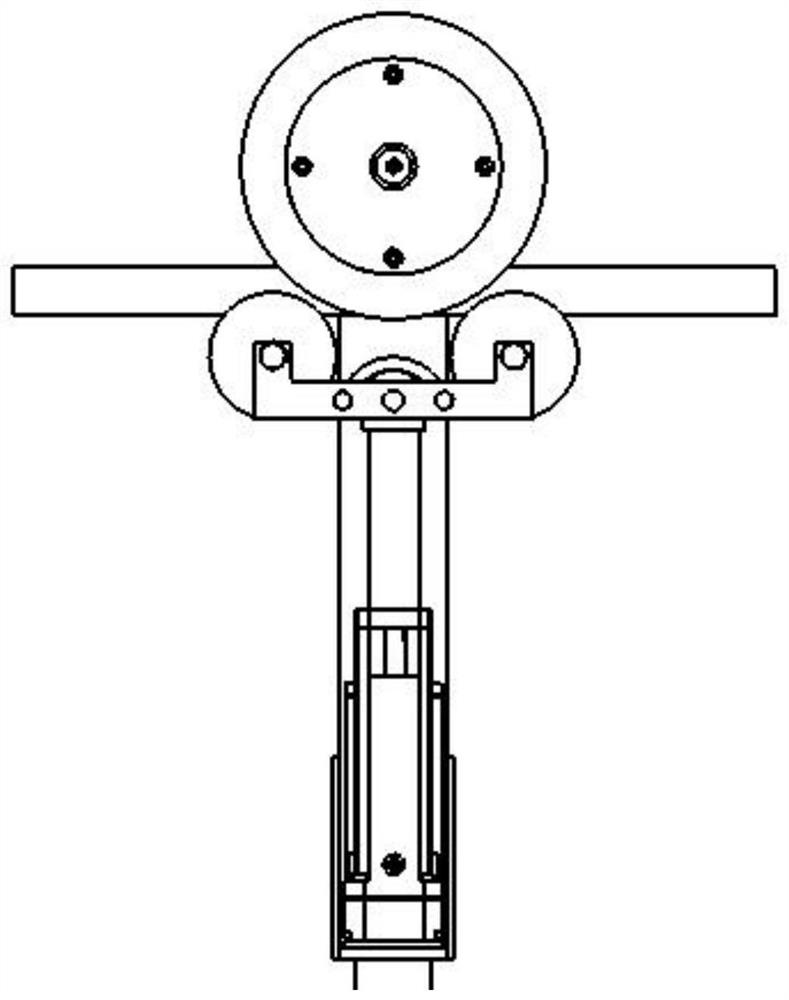
[0025] Embodiment 1: as Figure 1-6 As shown, a three-arm type high-voltage line walking robot includes a first suspension arm 24, a second suspension arm 25 and a third suspension arm 26, and the first suspension arm 24, the second suspension arm 25 and the third suspension arm The three suspension arms 26 have the same structure, and the upper ends are staggered and connected to the high-voltage line 12 successively. The lower ends of the first suspension arm 24 and the third suspension arm 26 are connected to the electrical box 8 through an electric lifting and traversing mechanism, and the second suspension arm The 25 lower ends are connected to the electrical box 8 by an electric lifting and longitudinal moving mechanism.
[0026] Preferably, the first suspension arm 24, the second suspension arm 25 and the third suspension arm 26 all include a traveling wheel 1, an electric locking mechanism, a support plate 11 and an electrical box 8, and the traveling wheel 1 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More