

Multi-point imaging rapid maneuvering control method for low-orbit optical remote sensing satellite
A technology of optical remote sensing and satellite, applied in the field of aerospace
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
[0055] A low-orbit optical remote sensing satellite multi-point imaging fast maneuvering control method, the method includes the following steps:
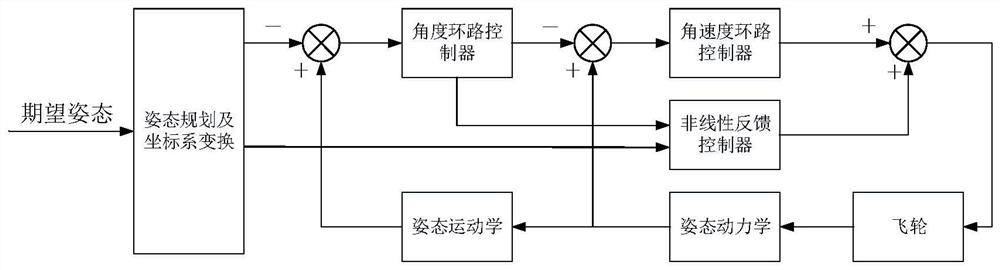
[0056] Step 1: Carry out kinematic dynamics modeling for low-orbit optical remote sensing satellites: define F I Indicates the inertial coordinate system, F B Indicates the satellite body coordinate system; the satellite body coordinate system F B Relative to the inertial coordinate system F I The angular velocity is expressed as body coordinate system F B Relative inertial coordinate system F I The pose of is represented as a unit quaternion and satisfy the constraints where q 0 is the scalar part of the quaternion Q, q=(q 1 ,q 2 ,q 3 ) is the vector part of the quaternion Q, Represents an n-dimensional real vector space, and the kinematics and dynamics equations of the satellite a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More