Obstacle detection method and device, vehicle and storage medium
An obstacle detection and obstacle technology, applied in the field of data processing, can solve the problems of long detection distance, affect the subsequent processing of the automatic driving perception system, and the obstacle information of millimeter wave radar is not very accurate, so as to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
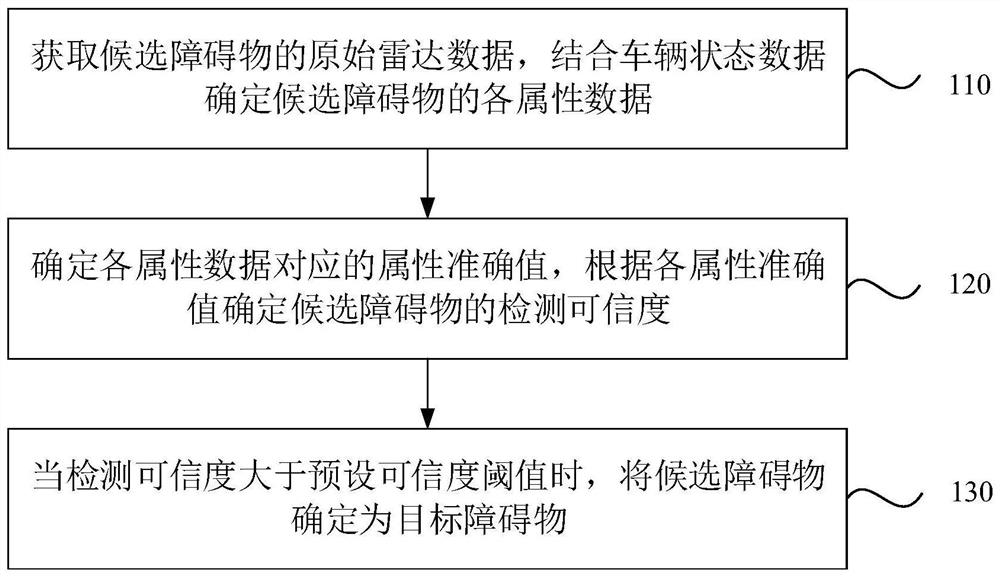
[0045] figure 1 It is a flow chart of an obstacle detection method provided by Embodiment 1 of the present invention. This embodiment is applicable to detecting obstacles around the vehicle. The method can be executed by an obstacle detection device, which can be implemented by software and / or or hardware implementation.
[0046] Such as figure 1 As shown, the method specifically includes the following steps:
[0047] Step 110, acquiring the original radar data of the candidate obstacle, and determining the attribute data of the candidate obstacle in combination with the vehicle state data.
[0048] Wherein, the original radar data can be understood as the original data information of the surrounding objects detected by the radar device. Vehicle state data can be understood as the current driving state data of the vehicle. Candidate obstacles can be understood as preliminarily judging possible obstacles based on the original radar data collected by the radar device. Attri...
Embodiment 2
[0061] figure 2 It is a flow chart of an obstacle detection method provided by Embodiment 2 of the present invention. In this embodiment, on the basis of the foregoing embodiments, the foregoing obstacle detection method is further optimized.
[0062] Such as figure 2 As shown, the method specifically includes:
[0063] Step 210, acquiring the original radar data of the candidate obstacles, and determining the attribute data of the candidate obstacles in combination with the vehicle state data.
[0064] Specifically, the obstacle detection device can analyze the received raw radar data, and combine the vehicle state data obtained from other sensors of the vehicle to calculate the attribute data corresponding to each attribute of the candidate obstacle.
[0065] Exemplary, image 3 It is a schematic diagram of determining attribute data in an obstacle detection method provided in Embodiment 2 of the present invention. Such as image 3 As shown, taking the extraction of ...
Embodiment 3
[0092] The obstacle detection device provided in the embodiment of the present invention can execute the obstacle detection method provided in any embodiment of the present invention, and has corresponding functional modules and beneficial effects for executing the method. Figure 10 is a structural block diagram of an obstacle detection device provided in Embodiment 3 of the present invention, as shown in Figure 10 As shown, the device includes: an attribute data determination module 310 , a detection reliability determination module 320 and an obstacle determination module 330 .
[0093] The attribute data determining module 310 is configured to acquire the original radar data of the candidate obstacles, and determine each attribute data of the candidate obstacles in combination with the vehicle state data.
[0094] The detection reliability determination module 320 is configured to determine the attribute accuracy value corresponding to each attribute data, and determine t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More