

An outdoor autonomous mobile system and method for a robot based on a roadside two-dimensional code unit
An autonomous mobile and robot technology, applied in the field of mobile robots, can solve problems such as positioning failure, limited flexibility, and limited versatility, and achieve simple and accurate positioning and real-time deviation correction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further explained below in conjunction with the accompanying drawings.
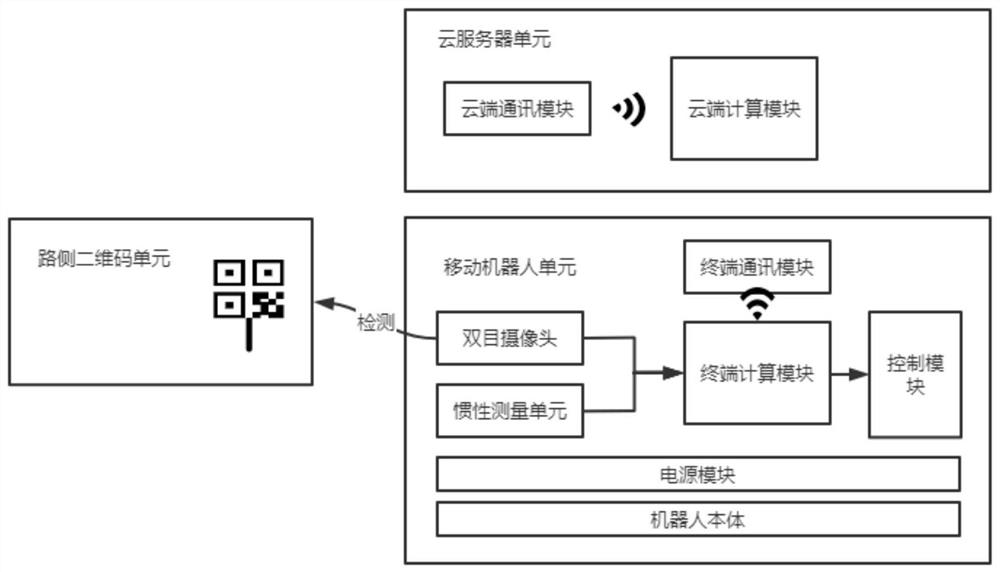
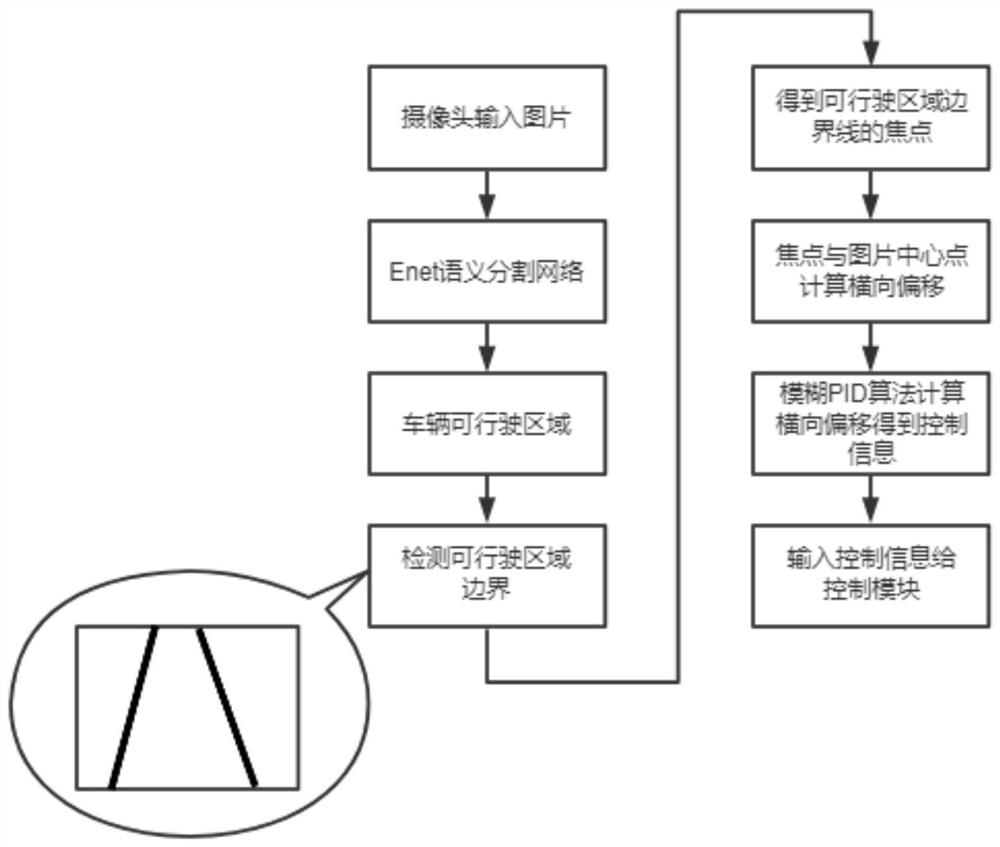
[0036] The present invention proposes a robot outdoor autonomous mobile system based on the roadside two-dimensional code unit. The mobile robot unit first communicates with the cloud server unit to obtain the position of the target location and the current position of the robot. Calculate the forward trajectory, send it to the mobile robot unit, and start to move forward. The mobile robot unit relies on the camera to obtain the information of the straight lane ahead, and identifies the drivable area ahead through the calculation module. The calculation module uses the ENet semantic segmentation algorithm to calculate the drivable area, so as to move forward. The two-dimensional code of the two-dimensional code unit obtains the relative position between the robot and the fixed two-dimensional code, guides the robot to make a turn, and obtains the curve ID information o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More