

PID control parameter self-correction method based on closed-loop step response cascade loop
A step response, closed-loop technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems affecting the normal operation of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
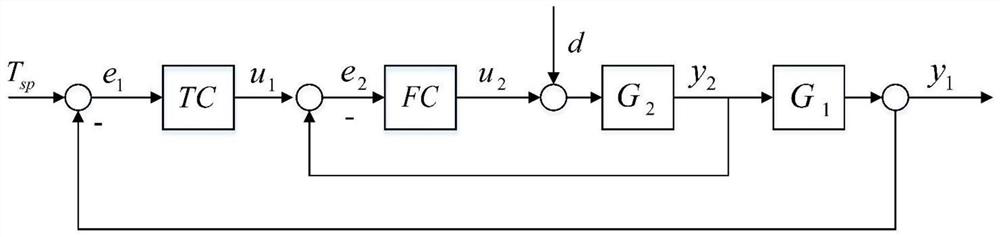
[0078] This embodiment provides a cascade loop parameter self-calibration method, the method comprising:
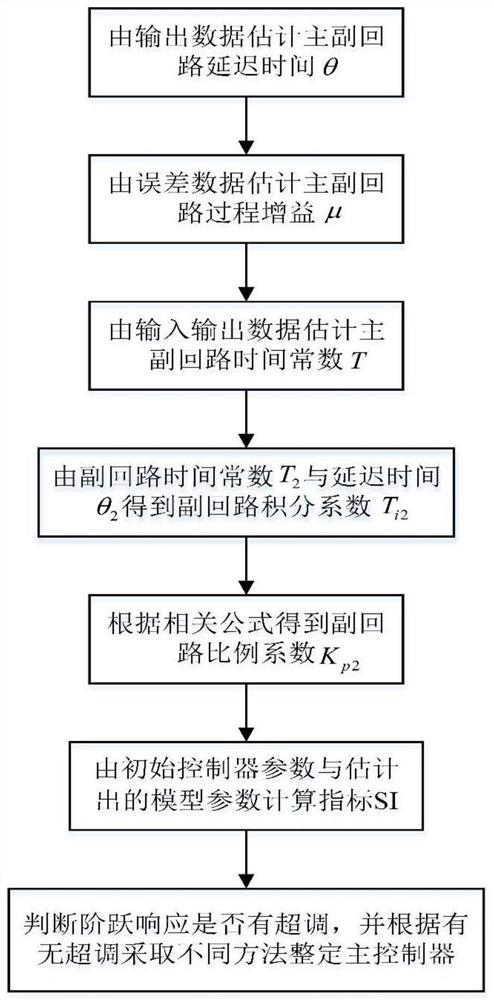
[0079] S1 collects the closed-loop step response data of the cascade controller applied in the controlled system, and estimates the model parameters of the controlled object of the main and secondary loops in the controlled system according to the closed-loop step response data;
[0080] The controlled object of the main loop of the cascade controller is:
[0081]
[0082] The controlled object of the secondary loop of the cascade controller is:
[0083]
[0084] where μ 1 ,μ 2 The process gains of the controlled objects of the main and secondary loops respectively, θ 1 ,θ 2 The delay time of the controlled objects of the main and secondary loops respectively, τ 1i ,τ 2 The time constants of the controlled objects of the main and secondary circuits respectively;
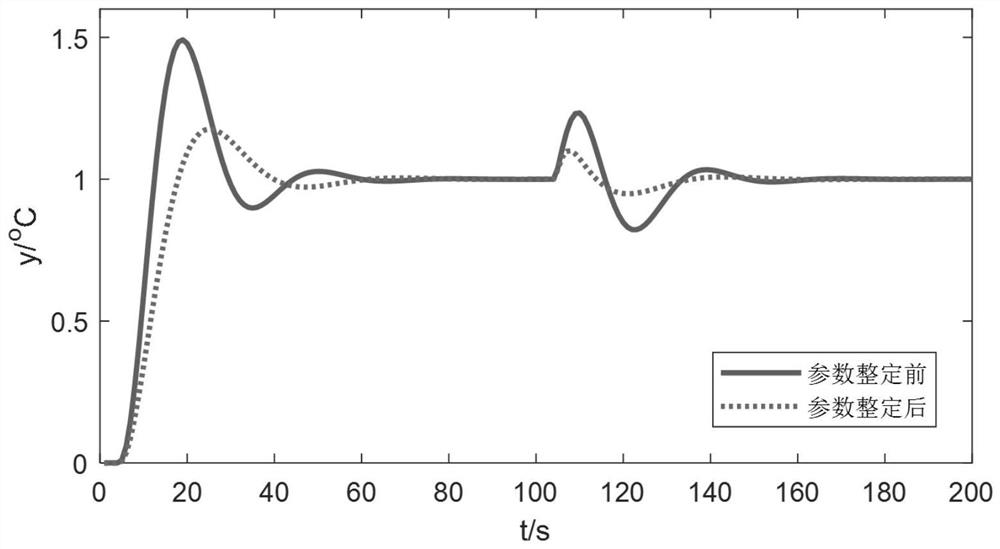
[0085] Under the action of the initial parameters of the cascade controller, the closed-loop ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More