

A synchronous control system and method based on repetitive motion multi-axis control
A multi-axis control and synchronous control technology, applied in the direction of speed adjustment of multiple motors, can solve the problems of difficulty in ensuring the smooth operation of the drive device, inability to ensure constant deviation of the phase angle, and difficulty in realizing the bionic device, achieving easy implementation and improvement. Phase difference, the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to better understand the above technical solutions, the technical solutions of the present application will be described in detail below through the accompanying drawings and specific embodiments. It is not a limitation on the technical solutions of the present application, and the embodiments of the present application and the technical features in the embodiments may be combined with each other under the condition of no conflict.
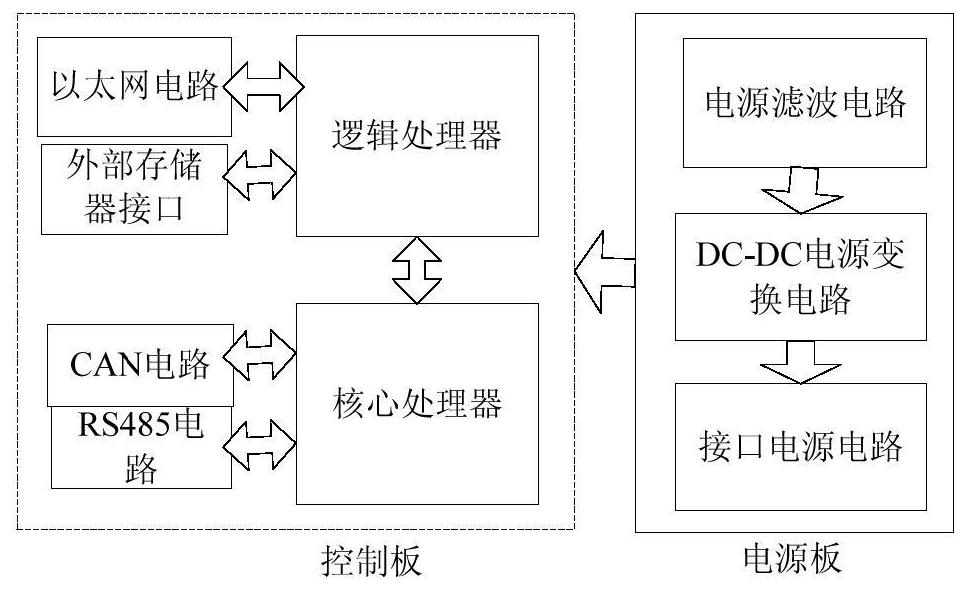
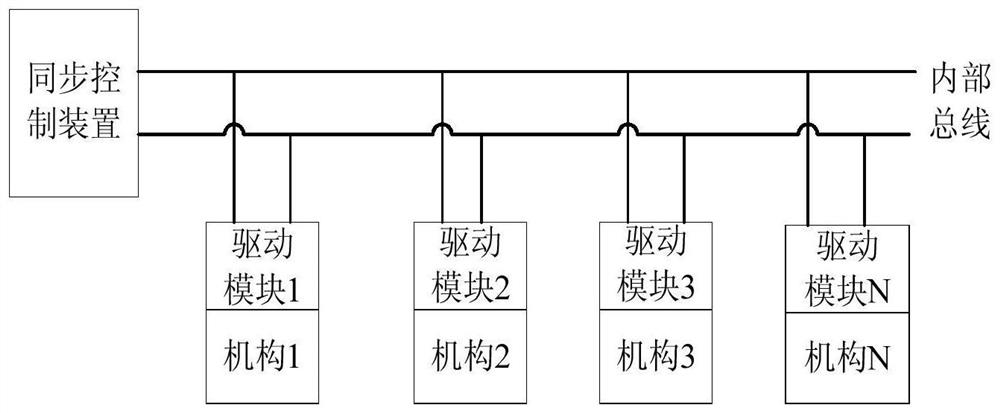
[0040] A synchronous control system and method based on repetitive motion multi-axis control provided by the embodiments of the present application will be described in further detail below with reference to the accompanying drawings. Specific implementations may include (such as figure 1 shown):
[0041] The synchronous control system is composed of a synchronous control device and a corresponding drive module. The drive module completes the drive of the mechanism, and the synchronous control device realizes the synchronization of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More