

Robust intelligent cooperative calibration method for INS/DVL integrated navigation system
A technology for an integrated navigation system and a calibration method, which is applied to radio wave measurement systems, measurement devices, instruments, etc., and can solve problems such as difficulty in meeting requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
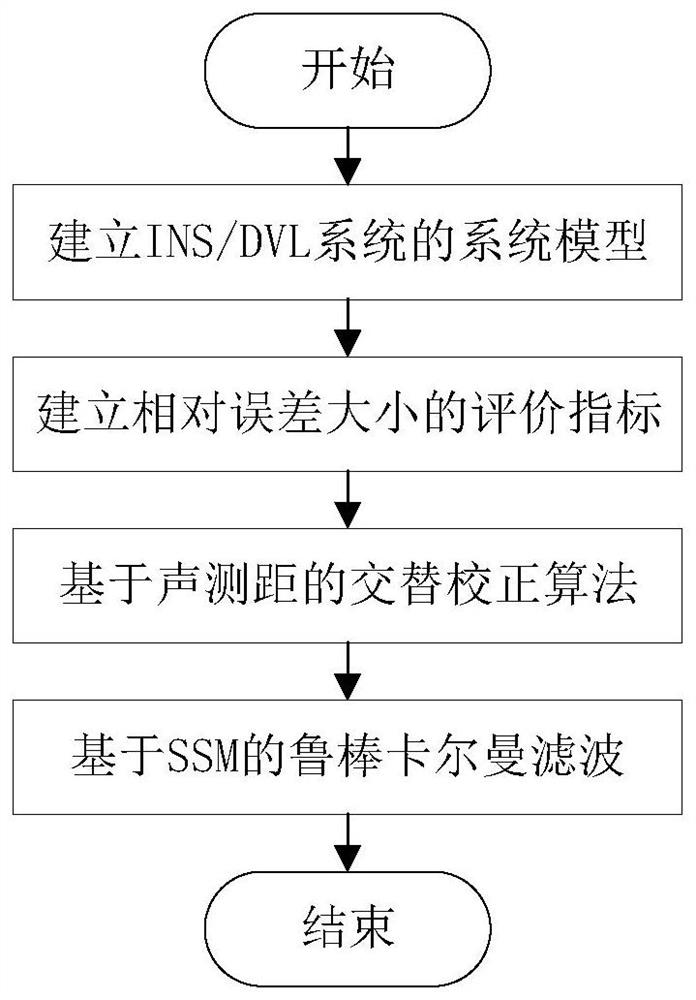
[0086] combine figure 1 , the specific embodiment of the present invention comprises the following steps:
[0087] Step 1: Establish a traditional INS / DVL system model including state equations and measurement equations;
[0088] Specific steps are as follows:
[0089] The first step is to establish the state equation of the system. To derive the error equation for an inertial navigation system, we define the following coordinate system. The carrier coordinate system of the inertial navigation system is expressed as b, the inertial coordinate system is expressed as i, the earth-centered ground-fixed coordinate system is expressed as e, the actual navigation coordinate system is expressed as n, and the calculated navigation coordinate system is expressed as n'. Select the northeast sky coordinate system as the navigation coordinate system n. The error model of the inertial navigation system can be obtained by derivation:
[0090]
[0091]
[0092]
[0093]
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More