

A mobile target location algorithm based on uwb mobile node
A technology of moving targets and positioning algorithms, applied in the field of precision measurement, can solve the problems of limited ranging error identification and mitigation of ranging accuracy, nodes may already be in the next position, positioning and tracking difficulties, etc., to improve positioning accuracy, low Effects of Eliminating Errors and Improving Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0102] The present invention is further elaborated below in conjunction with the accompanying drawings and specific embodiments.
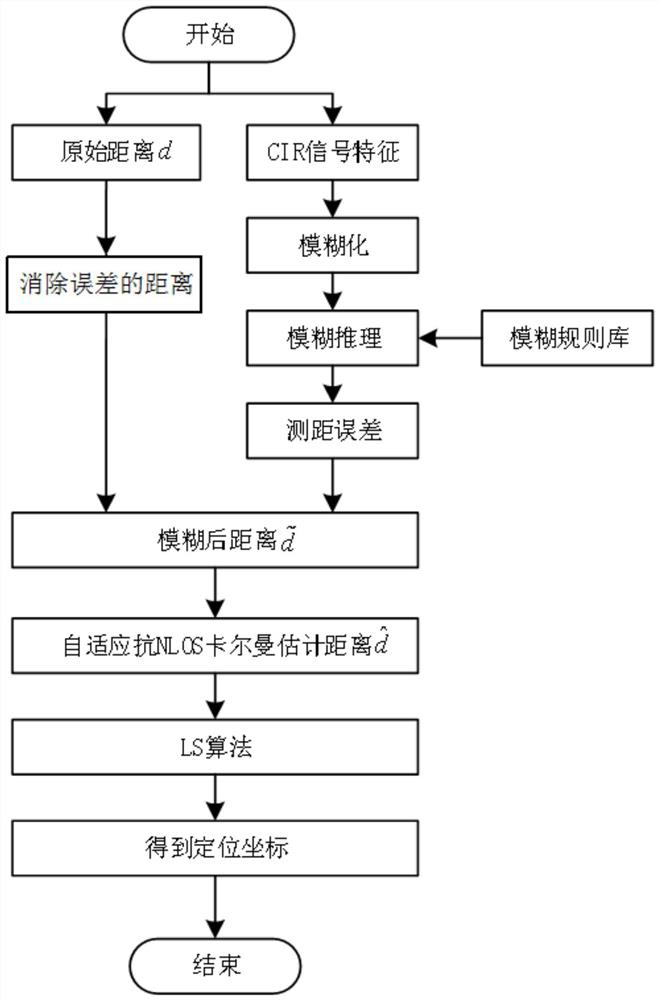
[0103] A mobile target positioning algorithm based on UWB mobile node, which is generally a fusion positioning algorithm based on fuzzy inference and adaptive anti-NLOS Kalman filtering, the flowchart can be found in the flow chart Figure 1 , which includes the following steps:
[0104] (1) Establish a UWB positioning model, arrange at least 3 base station nodes in three-dimensional space, and set label nodes on the moving target to be measured;
[0105] (2) The distance between the base station node and the label node is measured by the UWB positioning model, and the error caused by clock offset and clock drift is eliminated by pre-treatment, and the distance test value after the error is eliminated, and the rough position coordinates of the moving target are obtained;
[0106] (3) Step (2) The received signal strength of the CIR signal collected from ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More