

Mechanical arm motion planning method
A technology of motion planning and manipulators, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as poor path smoothness, poor guidance, and high time complexity of algorithms, so as to speed up convergence and avoid wasting time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
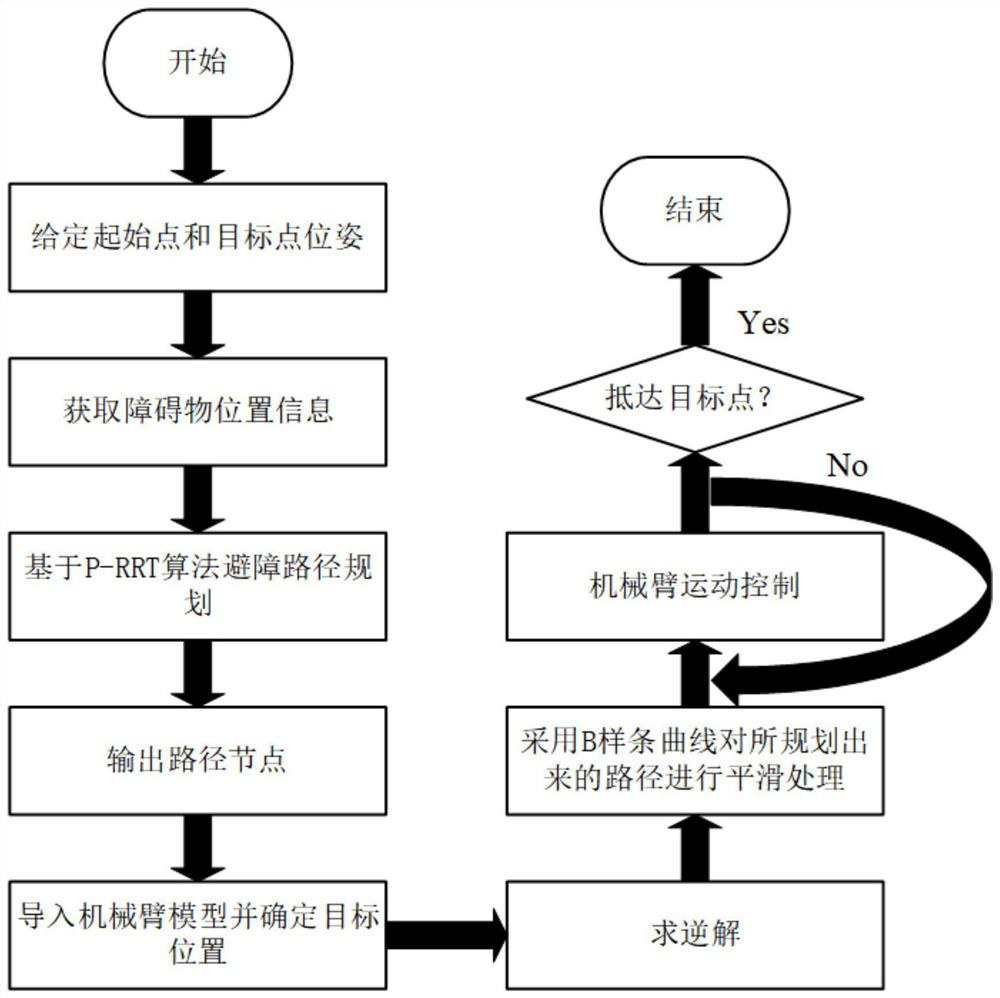
[0040] A kind of mechanical arm motion planning method of the present invention, such as figure 1 As shown, the specific steps are as follows:
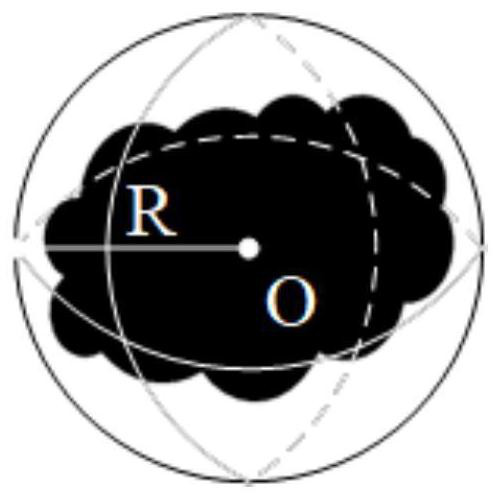
[0041] Step 1. Use common spatial rule objects to approximate envelope obstacles for obstacle modeling; for example figure 2 as shown,
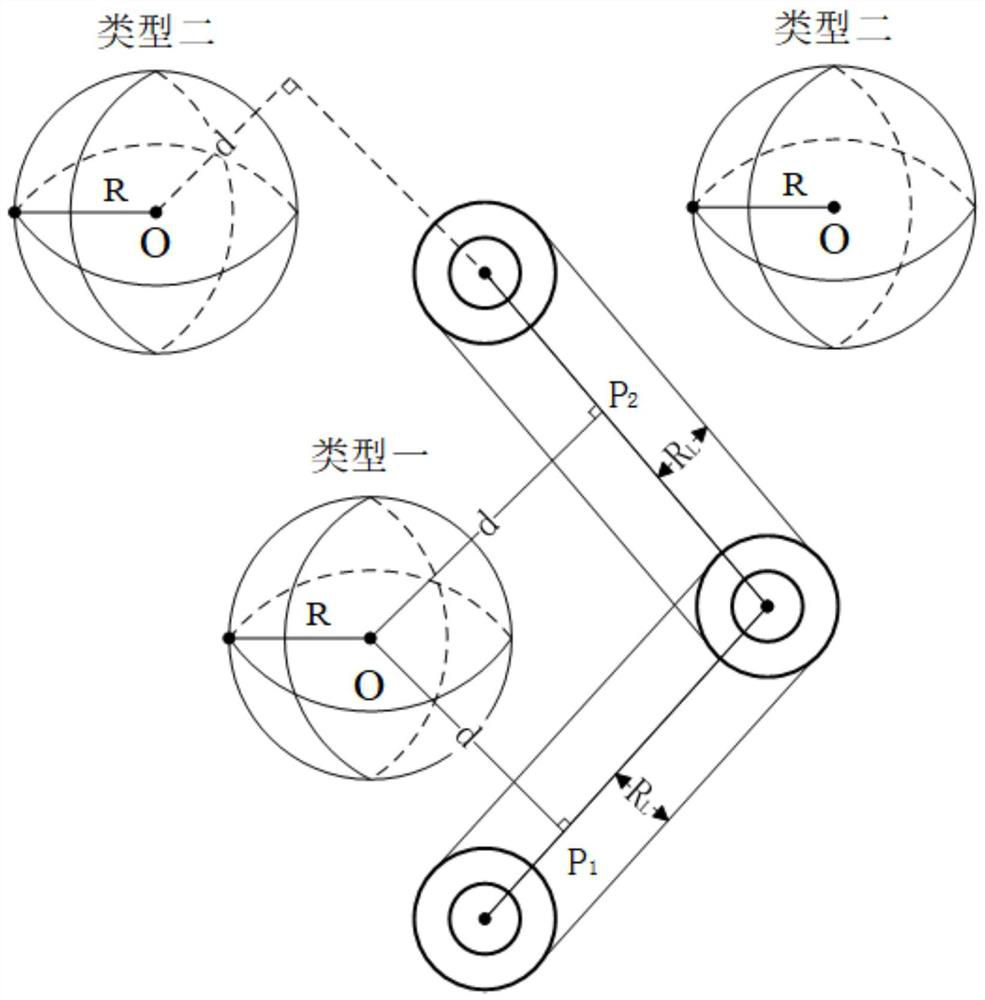
[0042] Step 1 is specifically implemented as follows: obtain the size and position information of the obstacle, and set up a collision detection scheme; in order to avoid collisions between the connecting rods of the manipulator and the obstacle, after enveloping the obstacle into a sphere, it is necessary to calculate the spherical obstacle and The spatial position relationship between the connecting rods of the manipulator, such as image 3 As shown, if the distance between the connecting rod of the manipulator and the center of the spherical obstacle is less ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More