

Method for analyzing trajectory accuracy of industrial robot based on continuous dynamic time warping
A dynamic time-warping, industrial robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., to improve trajectory accuracy and avoid mapping errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
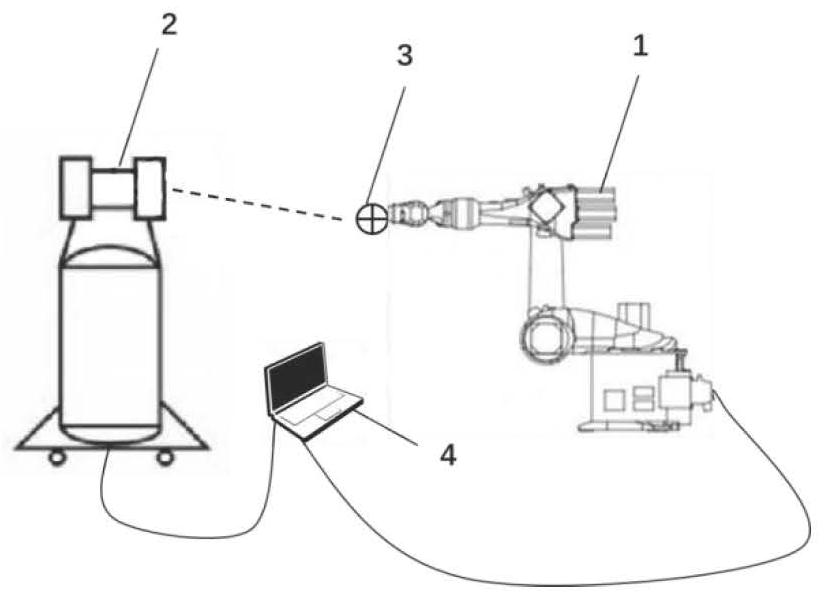
[0034] A laser tracker is used to measure the trajectory of an industrial robot, and the measurement system such as figure 1 shown. The system includes 1-industrial robot, 2-laser tracker, 3-target ball, 4-host computer.
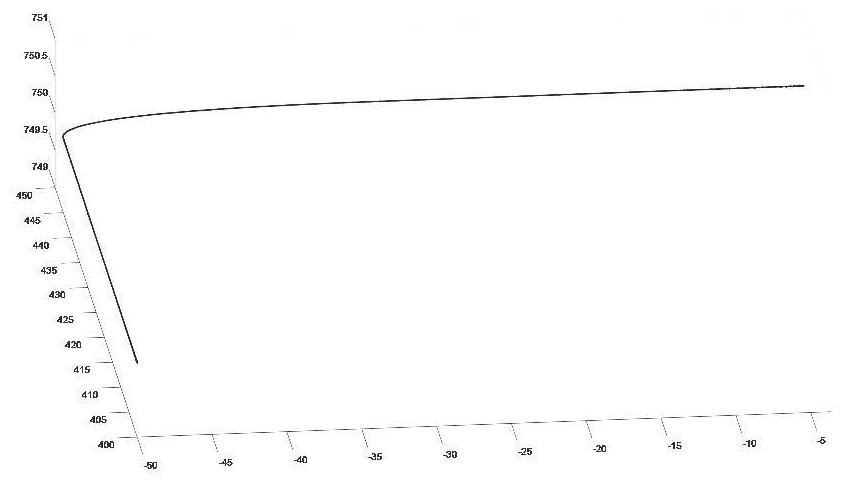
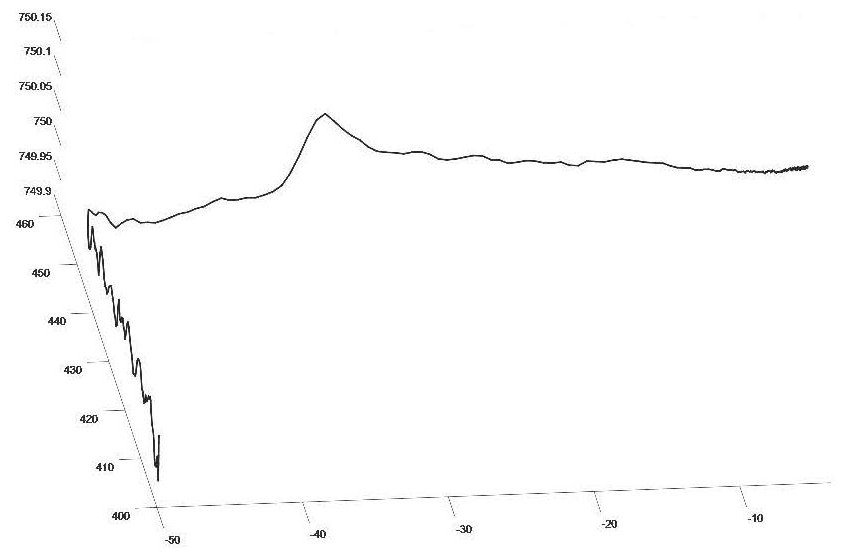
[0035] Compile a test trajectory based on the optional test trajectory data set specified in the ISO standard, which is located in the standard test plane within the working space range of the industrial robot, including a combination of straight line, circular arc and corner motion. The robot first executes a straight line trajectory, the coordinates of the starting point P1 are (400,-50,750), and the coordinates of the arrival point P2 are (450,-50,750). Next, perform a smooth corner of the arc type, and set the corner to 5mm. Finally, a straight line trajectory is executed, and the end point P3 is (450,0,750).
[0036]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More