Rope drive device for pod deformation
A driving device and pod technology, which is applied in the direction of hoisting device, military equipment configuration, equipment for loading and unloading goods, etc. To achieve one-way flexibility and other issues, to achieve the effect of recycling safety, good fixing and winding, and reducing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
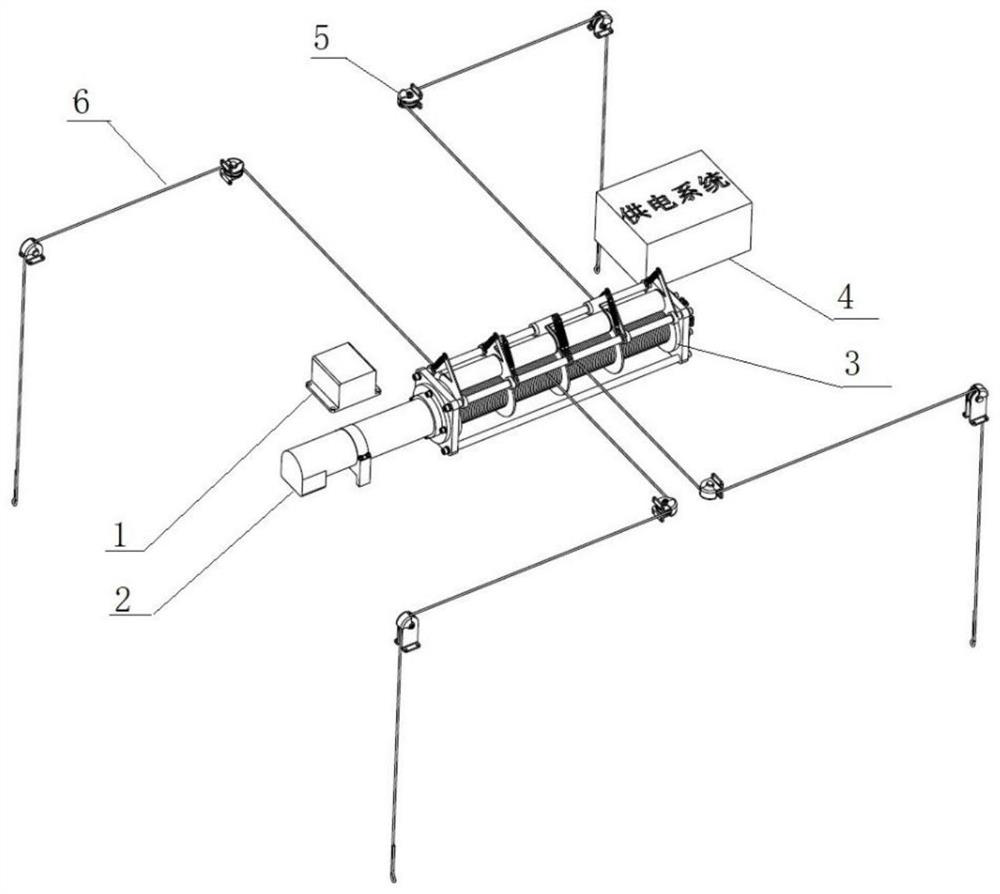
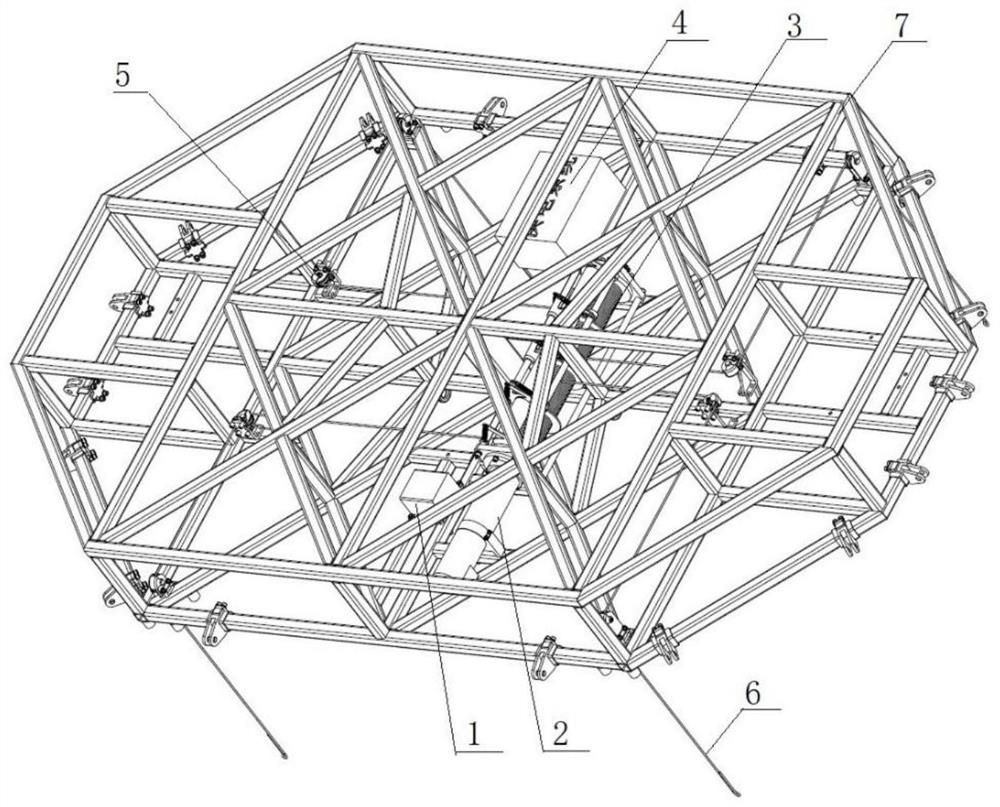
[0038] The embodiment of the present invention relates to a tether drive system for pod deformation, such as figure 1 , figure 2 , image 3 with Figure 7 As shown, a rope drive system for pod deformation, including control system 1, motor drive system (including power-off brake) 2, four-row electric synchronous winch system 3, power supply system 4, pulley direction change system 5, wire rope It is composed of seven parts such as 6 and the fixed frame 7 of the electric load compartment of the pod. Among them, the motor drive system (including power-off brake) 2 is fixedly installed on the flange of the four-row electric synchronous winch system 3 through bolts, and one end of the steel wire rope system 6 is fixedly installed on the end of the four-row electric synchronous winch system 3, and the other end is wound around the four-row electric synchronous winch system. Pass four rows of rollers 32, then pass through the pulley direction changing system 5, then pass through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com