Two-degree-of-freedom rope transmission type finger force feedback device
A technology of rope transmission and force feedback, which is applied in the field of force feedback, can solve the problems of pure rigidity movement and can not be adjusted, and achieve good human-computer interaction and comfort, light weight, soft feedback and real effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions provided by the present invention will be described in detail below in conjunction with specific implementations. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
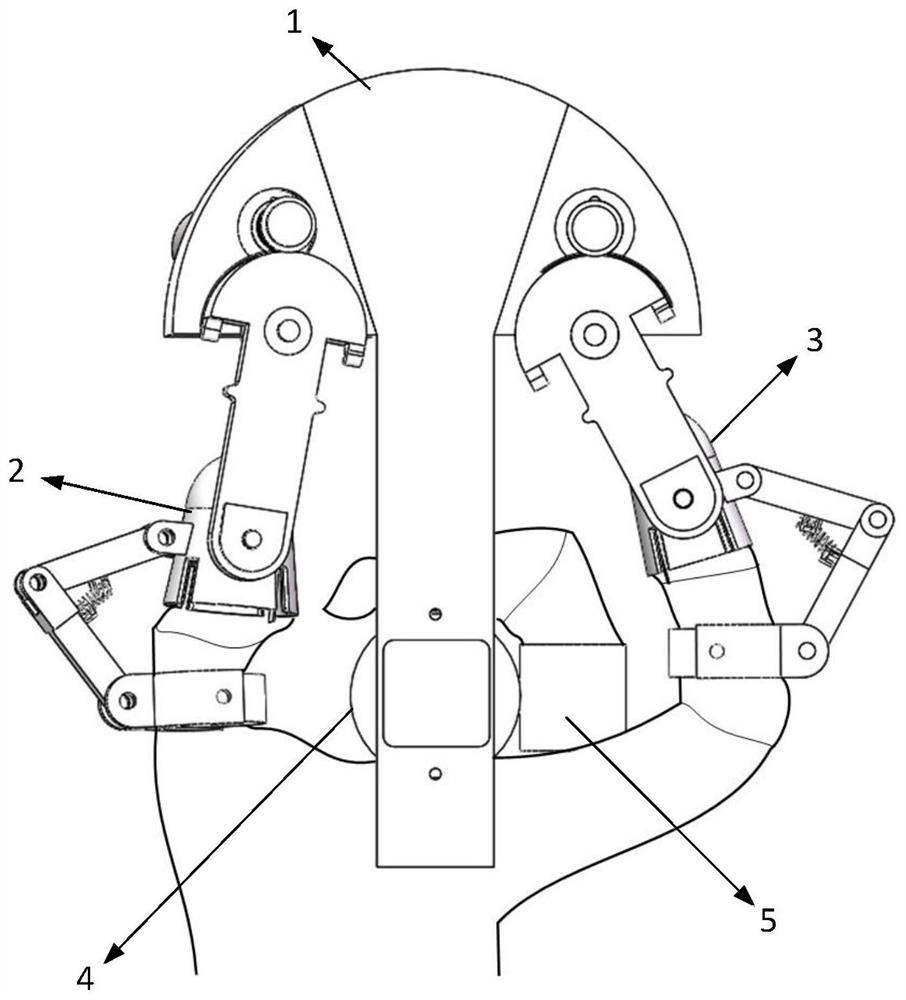
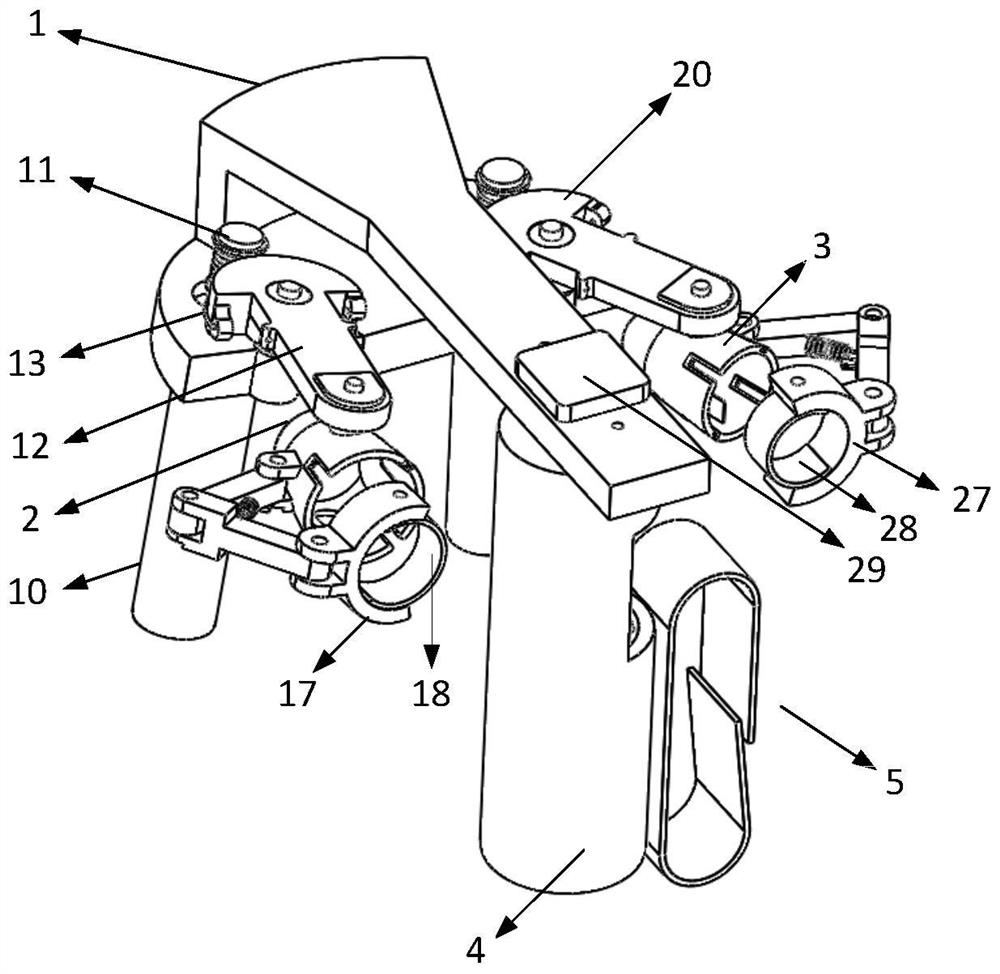
[0035] The two-degree-of-freedom rope-driven finger force feedback device provided by the present invention, such as figure 1 As shown, it mainly includes a hand support mechanism 1, a thumb movement mechanism, a forefinger movement mechanism and a handle mechanism. The user puts the middle finger, ring finger and little finger through the flexible fixing band 5 side by side and tensions them, and bends and grasps them on the cylindrical handle 4, which can ensure that the relative position of the hand and the force feedback mechanism remains unchanged. Thumb passes thumb support 17, the first joint of thumb is stretched in the thumb cover 2, and thumb suppo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More