Visual information determination method and device, equipment and storage medium
A technology for visual information and determination methods, applied in the field of image processing, can solve the problems of difficulty in feature point extraction, reduction of feature point constraint relations, and reduction in the number and quality of extracted feature points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
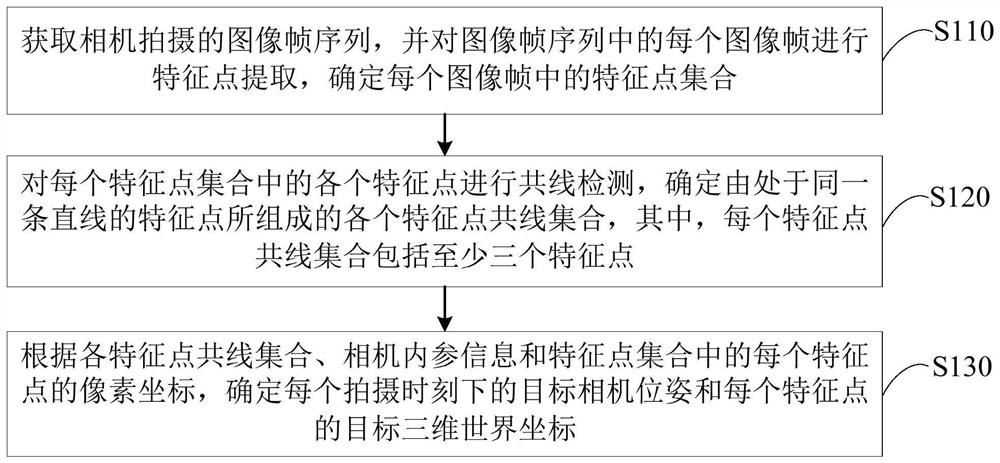
[0029] figure 1 It is a flow chart of a method for determining visual information provided by Embodiment 1 of the present invention. This embodiment is applicable to camera pose optimization and map reconstruction based on image frame sequences, especially for unmanned aerial vehicles, robots, automatic Scenarios for determining visual information in driving technology or augmented reality. The method can be executed by a visual information determination device, which can be implemented by software and / or hardware, and integrated into devices that need to perform map reconstruction, such as drones, robots, glasses, and the like. The method specifically includes the following steps:
[0030] S110. Acquire a sequence of image frames captured by the camera, and perform feature point extraction on each image frame in the sequence of image frames, and determine a set of feature points in each image frame.
[0031] Wherein, the sequence of image frames may be a sequence composed o...
Embodiment 2
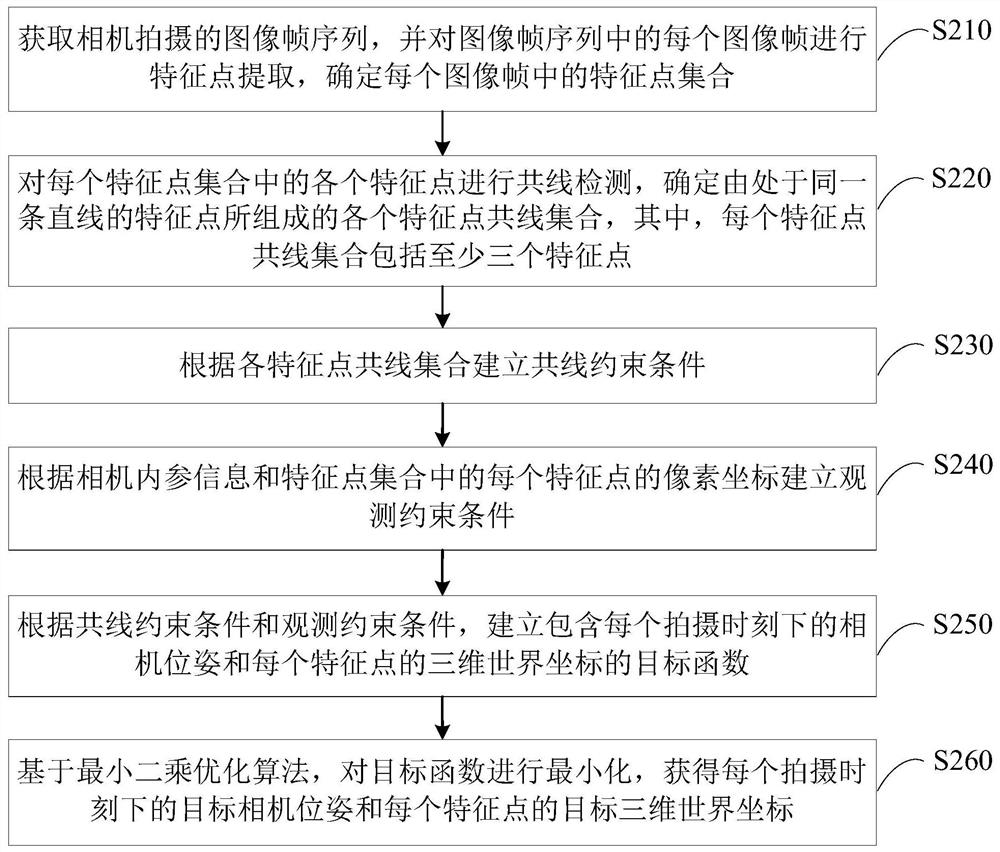
[0051] image 3 It is a flow chart of a method for determining visual information provided by Embodiment 2 of the present invention. On the basis of the above embodiments, this embodiment "according to collinear constraints and observation constraints, the camera position at each shooting moment The pose and the 3D world coordinates of each feature point are optimized, and the target camera pose and the target 3D world coordinates of each feature point are determined at each shooting moment" and optimized. The explanations of terms that are the same as or corresponding to those in the foregoing embodiments are not repeated here.
[0052] see image 3 The method for determining visual information provided in this embodiment specifically includes the following steps:
[0053] S210. Acquire a sequence of image frames captured by the camera, and perform feature point extraction on each image frame in the sequence of image frames, and determine a set of feature points in each ima...
Embodiment 3
[0080] Figure 4 It is a schematic structural diagram of a visual information determination device provided by Embodiment 3 of the present invention. This embodiment is applicable to camera pose optimization and map reconstruction based on image frame sequences. The device includes: a feature point extraction module 310, a feature point A point collinear set determination module 320 and a visual information determination module 330 .
[0081] Wherein, the feature point extraction module 310 is used to obtain the image frame sequence taken by the camera, and perform feature point extraction for each image frame in the image frame sequence, and determine the feature point set in each image frame; the feature point collinear set The determining module 320 is configured to perform collinear detection on each feature point in each feature point set, and determine each feature point collinear set composed of feature points on the same straight line, wherein each feature point collin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com