

Mobile robot path planning method based on improved ant colony algorithm
A mobile robot, ant colony algorithm technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of long running time, difficult to find the global optimal path, large cumulative turning angle, etc. Achieve the effect of improving operating efficiency, improving global search capabilities, and reducing the number of turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
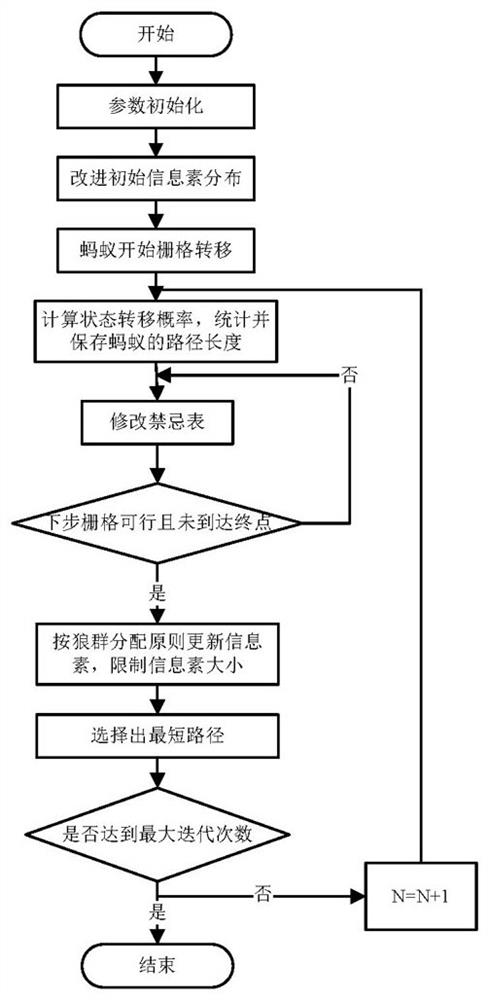
[0046] like figure 1 A mobile robot path planning method based on the improved ant colony algorithm is shown. The evaluation function of the A* algorithm is added to the heuristic function of the ant colony algorithm, which not only facilitates finding the global optimal path, but also speeds up the pathfinding speed. On the other hand, the corner constraint factor is added to the ant colony algorithm to avoid too many corners in the found path and the cumulative turning angle is too large, and it is applied to the path planning of the mobile robot to reduce the energy loss of the robot. Run time is accelerated to select an optimal path for a mobile robot combining path length and number of turns. Specific steps are as follows:
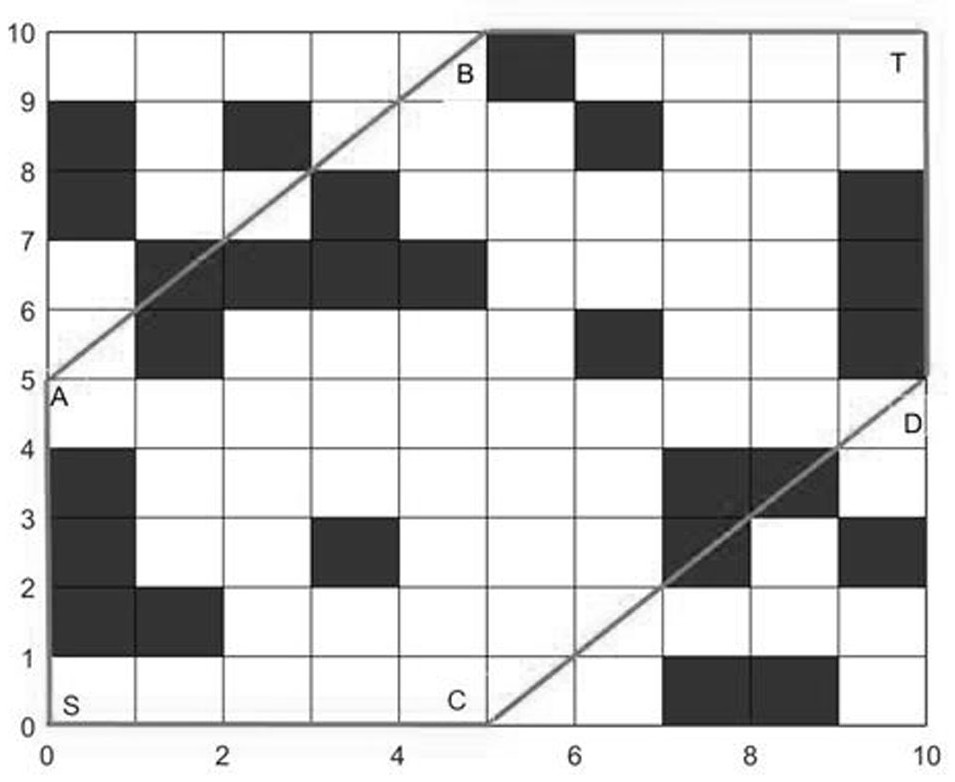
[0047] Step 1) Use the grid method to model the working environment, and set the starting point and target point of the movement for the mobile robot;
[0048] Create a grid map, the specific model is:
[0049]
[0050]Among them: x is the horiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More