

Welding workstation based on six-axis industrial robot
A technology of industrial robots and welding workstations, which is applied in the direction of instruments, simulators, and simulation devices for space navigation conditions. It can solve problems such as poor practicability, inconvenient operation, and reduced work efficiency. various effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
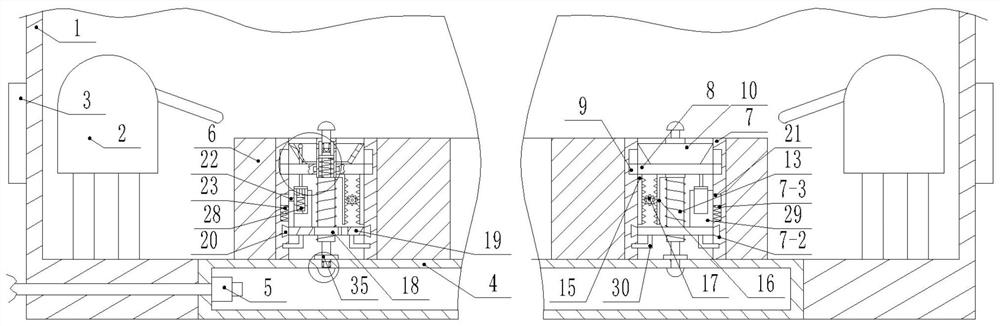
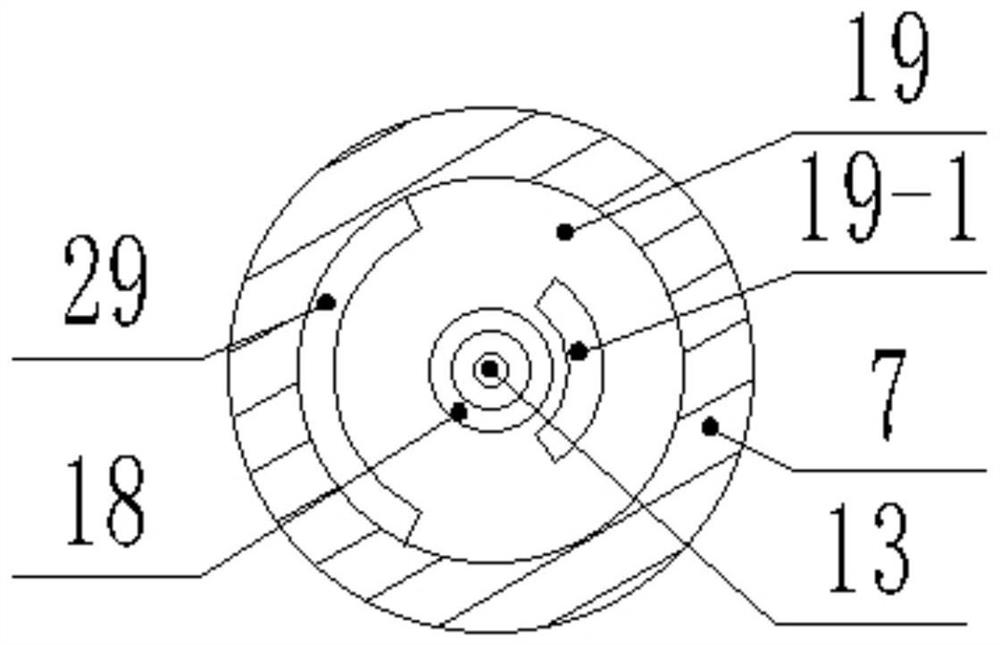
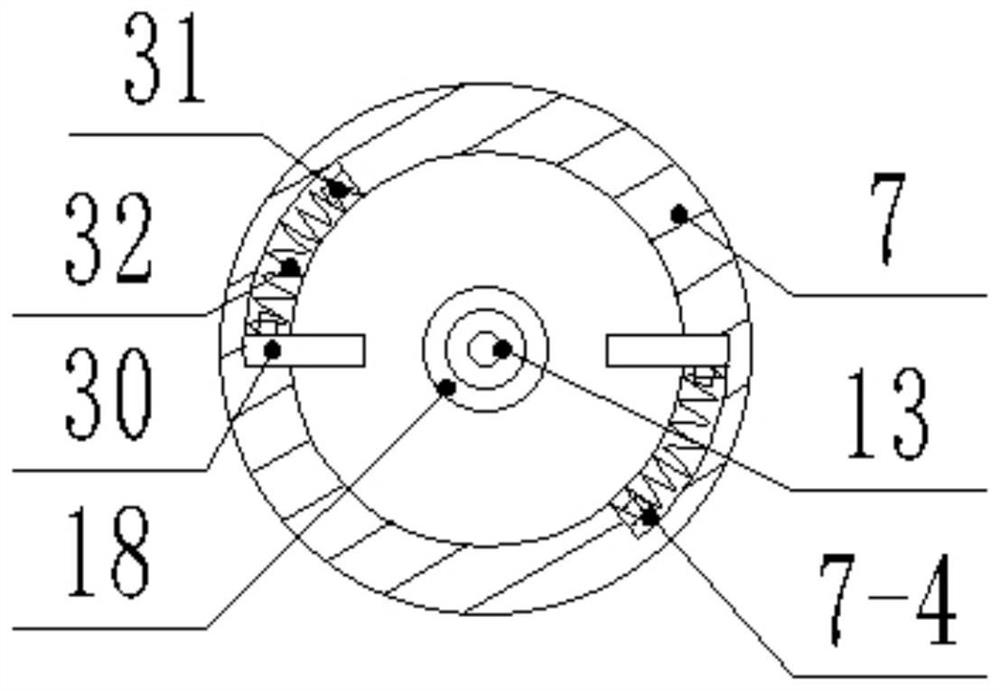
[0019] Such as Figure 1-7As shown, a welding workstation based on a six-axis industrial robot includes a welding station 1. Two six-axis industrial robots 2 are symmetrically arranged in the welding station 1, and two PLC controllers 3 are symmetrically and fixedly connected to the outer wall of the welding station 1. , the six-axis industrial robot 2 is electrically connected to the PLC controller 3, the inner bottom surface of the welding station 1 is fixedly embedded with a cavity 4, the inner wall of the cavity 4 is fixedly connected with a negative pressure fan 5, and the PLC control The device 3 is electrically connected with the negative pressure fan 5, the model of the negative pressure fan 5 is Y4-2X73N0275F, the output end of the negative pressure fan 5 passes through the welding station 1, and the top surface of the cavity 4 is fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More