

Magnetically absorbing wall-climbing robot crawler
A wall-climbing robot and magnetic adsorption technology, applied in the field of wall-climbing robots, can solve problems such as insecurity and system inconvenience, and achieve the effects of reducing impact force, improving motion performance, and reducing rotational torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
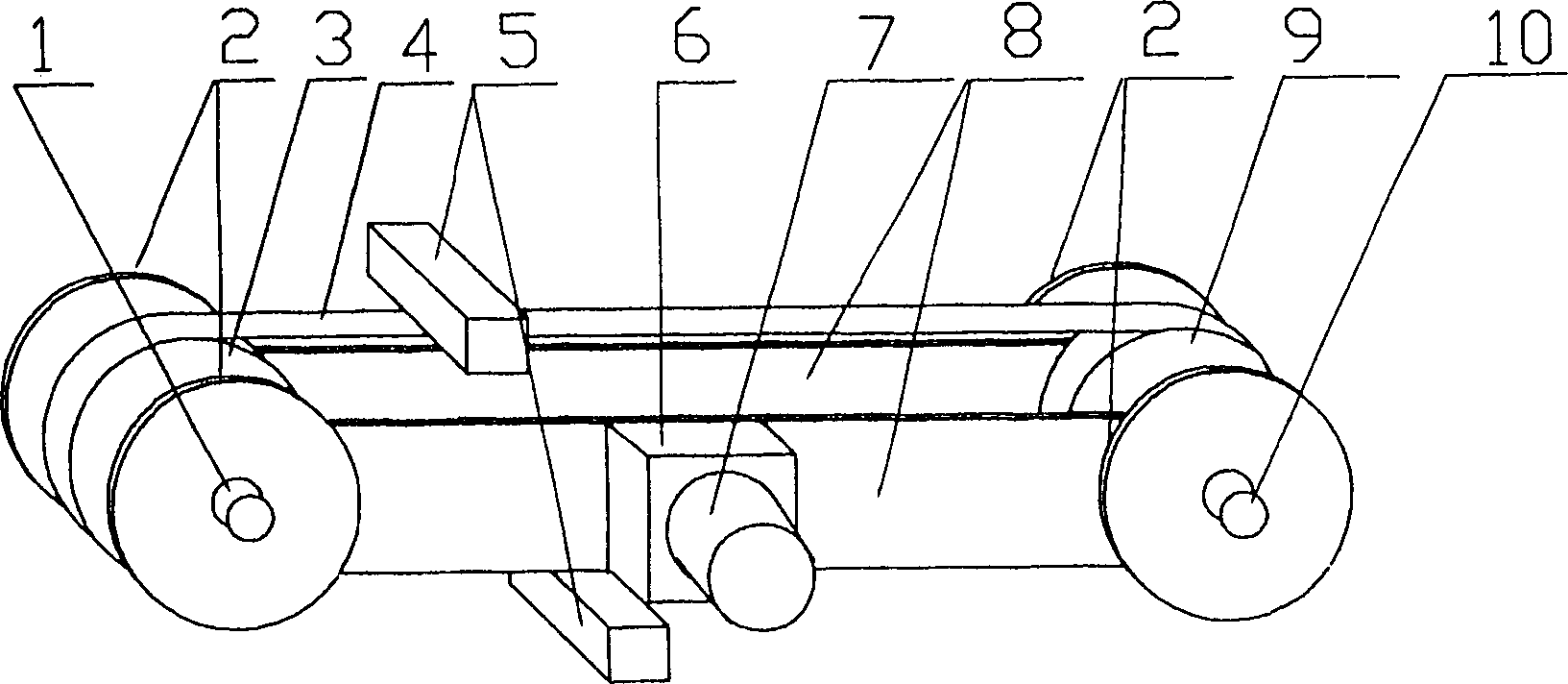
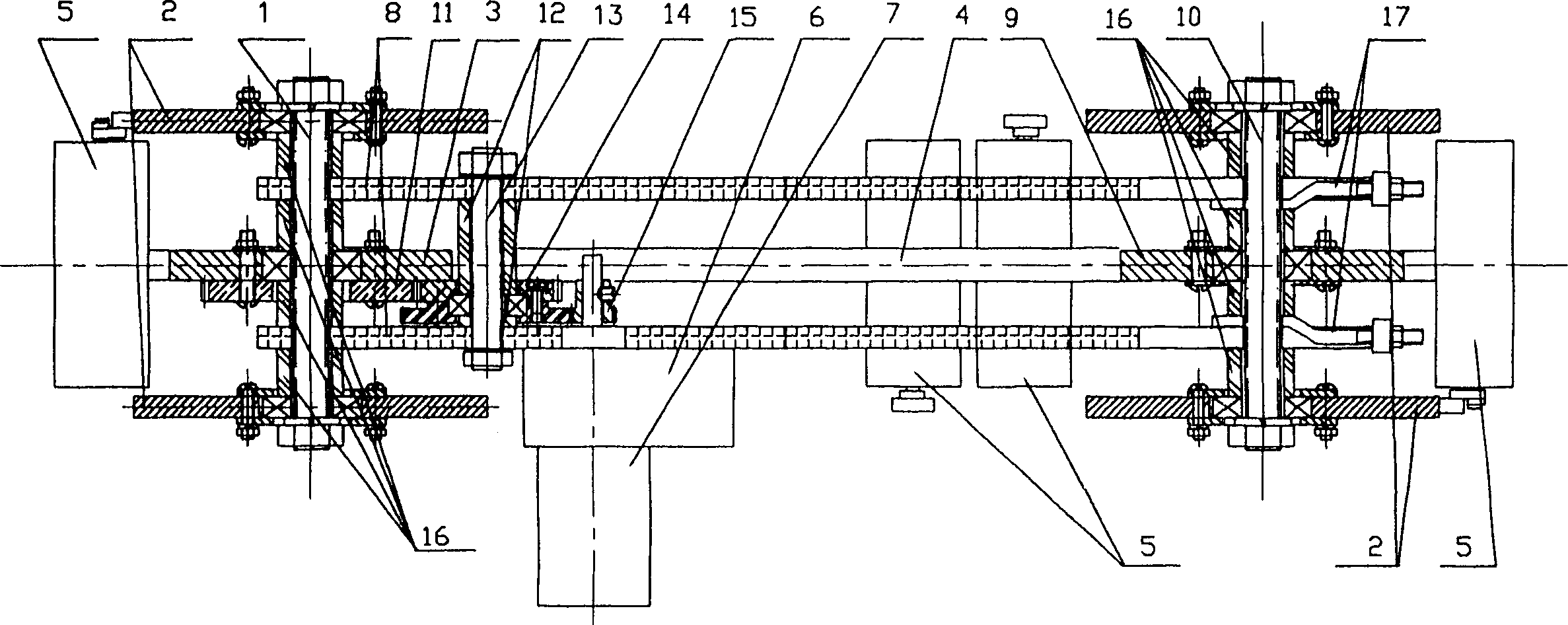
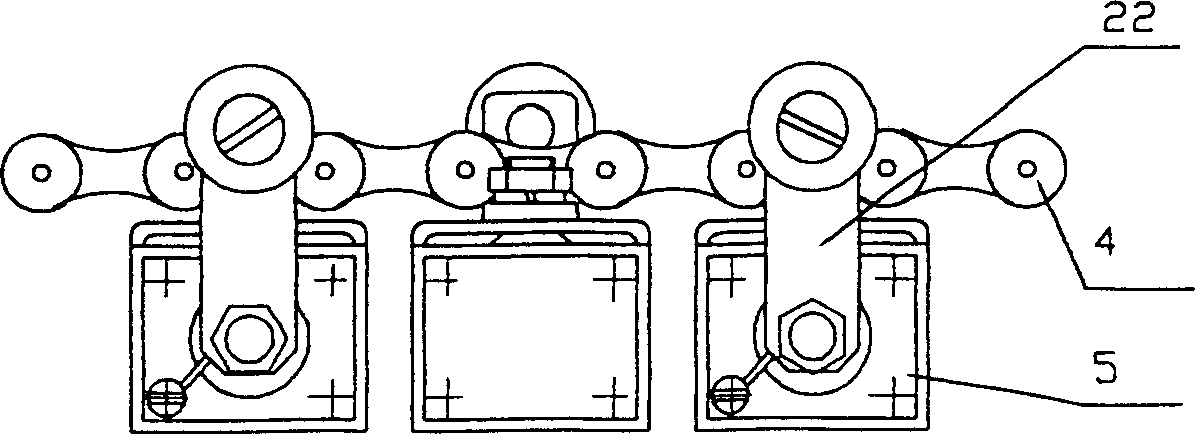
[0031] The magnetic adsorption wall-climbing robot crawler designed by the present invention includes two parts: an adsorption mechanism and a driving mechanism. A plurality of variable magnetic force adsorption units are evenly distributed on the chain through connecting bolts, and form a magnetic adsorption crawler with the chain. Among them, the adsorption units 5 are arranged alternately according to the direction of magnetic polarization to prevent the internal resistance of the movement caused by mutual attraction between the adsorption units; and the adsorption units should also be arranged alternately according to the end position of the unit where the lever is located to avoid Interference with each other when in a magnetic short circuit state. The tension mechanism 17 is used to adjust the distance between the front and rear sprocket shafts, so that the crawler belt can be adapted to the requirements of walls with different curvatures. The chain and the driving and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More