

Full-closed-loop interference rate compensation self-stabilization control method under geodetic coordinate system
A geodetic coordinate system and control method technology, applied in the field of artillery stability control system, can solve problems such as shock vibration, affecting stability, and insufficient stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
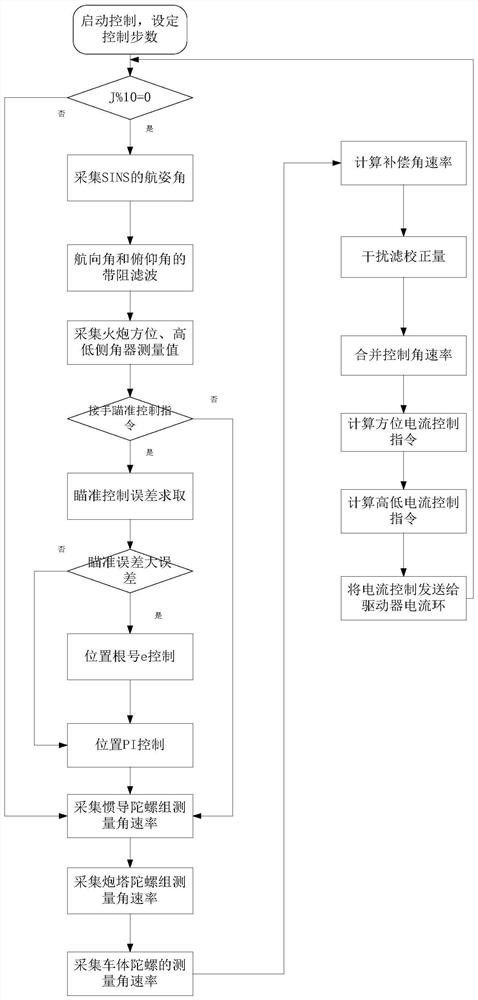
[0090] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
[0091] The present invention comprises the following steps:
[0092] (1) Start the control, set the number of control steps as j, i, and:
[0093] j=j+1
[0094] Where j is the number of control steps of the speed loop of the stable system, and the control cycle T s =1ms; i is the number of control steps of the position loop of the stable system, the control cycle T=10ms, j is 10 times faster than i; the initial value of j and i is 0;
[0095] (2) Judging that j%10=0? Yes, i=i+1, and turn to (3) step; otherwise turn to (9) step;
[0096] (3) Collect the attitude angle ψ(i), θ(i) of SINS, Among them, ψ(i) is the heading angle of SINS; θ(i) is the pitch angle of SINS; is the roll angle of SINS;
[0097] (4) Band-stop filtering of heading angle and pitch angle:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More