

AGV path planning method, storage medium and terminal
A path planning and path finding technology, applied to road network navigators, navigation, instruments, etc., can solve problems such as increased calculation, redundant paths, and short path-finding intervals, so as to reduce time, increase operating speed, and avoid The effect of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
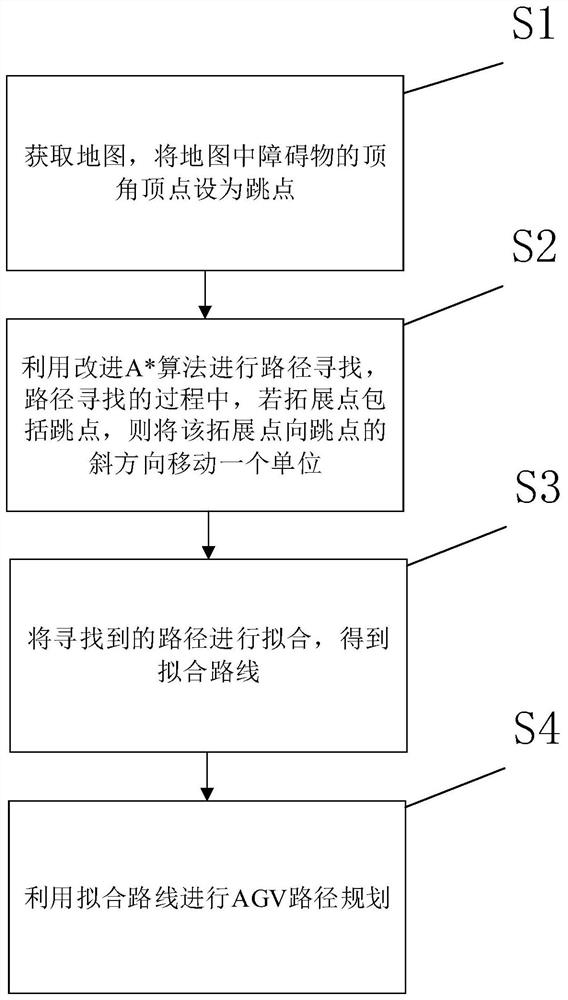
[0043] This embodiment provides an AGV path planning method, such as figure 1 As shown, the method includes the following steps:
[0044] S1: Obtain the map, and set the vertex of the obstacle in the map as the jumping point;
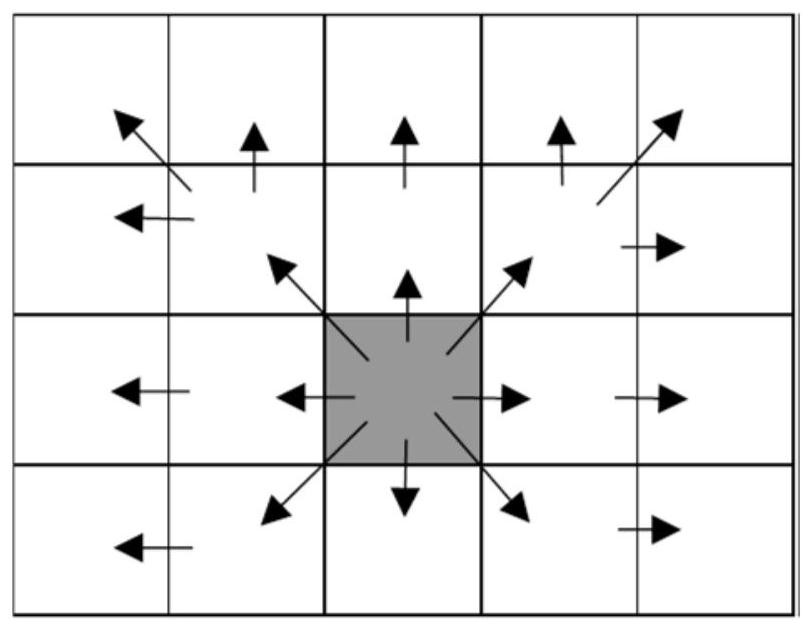
[0045] S2: Use the improved A* algorithm to find the path. During the path finding process, if the extension point includes a jump point, move the extension point to the oblique direction of the jump point by one unit;
[0046] S3: Fit the found path to obtain the fitted route;
[0047] S4: AGV path planning using the fitted route.
[0048] in particular:
[0049] In S1, the map is first processed to find out eligible jump points around obstacles.
[0050] S2 is implemented through the OPEN linked list and the CLOESD linked list. S2 includes:
[0051] S21: Create an OPEN linked list and a CLOSED linked list, initialize the starting point and the target point, put the starting point into the OPEN linked list, and put the jump point into the CLOSED l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More