Robot, monocular depth estimation method and system and storage medium
A technology of depth estimation and storage medium, applied in neural learning methods, instruments, computing, etc., can solve problems such as large field of view and inability to take into account the depth of images, and achieve the effect of saving computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
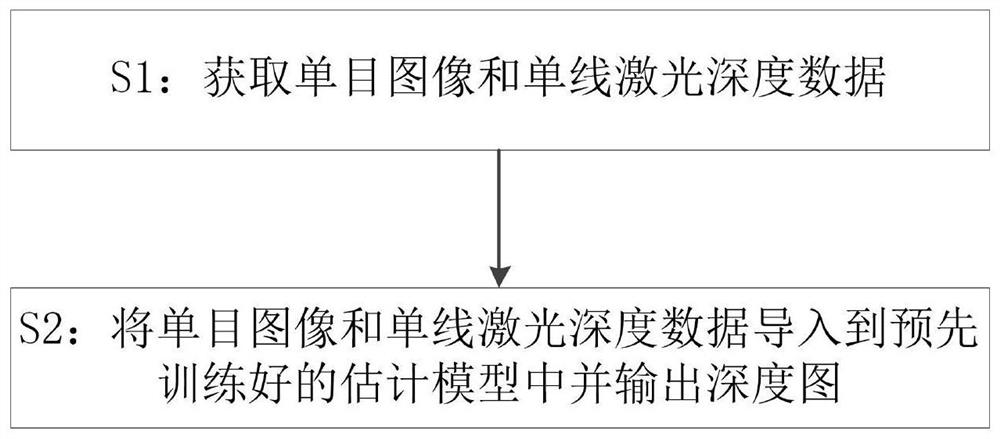
[0053]Such asfigure 1 As shown, the present embodiment discloses a single depth estimation method, including:
[0054]S1: Get a single-graphic image and a single line laser depth data;
[0055]S2: Import the single-graph image and the single-line laser depth data into a pre-training estimate model and output depth maps; the estimation model is based on the high-resolution net.
[0056]In conventional techniques, the RGB-D camera or binocular camera is generally used for the consideration of avoidance obstacles and environmental interactions, however the RGB-D is usually small in the process of actual use, while the depth of the binary cameras It is estimated that the computational complexity is high, and there is a large strength, resulting in a poor effect in the actual use.
[0057]In this embodiment, the use of single-line laser binding single-graph images, using a high resolution neural network model to achieve construction of depth maps, on the one hand, the field of view is much higher th...
Embodiment 2
[0061]This embodiment discloses a single-optical depth estimate, including:
[0062]S0: Training the estimation model:
[0063]S1: Get a single-graphic image and a single line laser depth data;
[0064]S2: Import the single-graph image and the single-line laser depth data into a pre-training estimate model and output depth maps; the estimation model is based on the high-resolution net.
[0065]Specifically include:
[0066]S0-1: Initialize the estimation model;
[0067]S0-2: Get a single-line laser depth data set, a single-graph image data set and depth map data set; the single-line laser depth data set, the single-graph image data set and the elements in the depth map data set correspond;
[0068]S0-3: Import the single-line laser depth data set and the individual image data set into the estimation model; the single-line laser depth data is an anchor point in the vertical direction;
[0069]S0-4: The output result set of the estimated model is set to the depth map data set and generate a deviation evaluat...
Embodiment 3
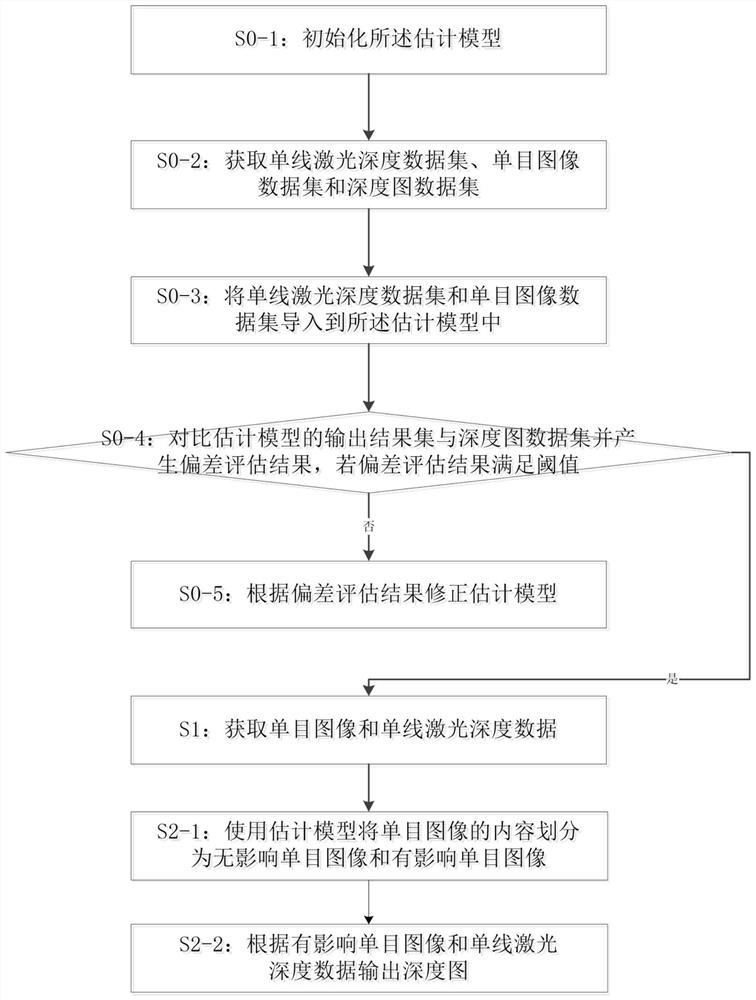
[0075]Such asfigure 2 As shown, the present embodiment discloses a single depth estimation method, including:
[0076]S0-1: Initialize the estimation model;
[0077]S0-2: Get a single-line laser depth data set, a single-graph image data set and depth map data set; the single-line laser depth data set, the single-graph image data set and the elements in the depth map data set correspond;
[0078]S0-3: Import the single-line laser depth data set and the single-graph image data set into the estimation model;
[0079]S0-4: The output result set of the estimated model is set to the depth map data set and generate a deviation evaluation result, and if the deviation evaluation result satisfies the threshold, enter S0-5, otherwise enter S1;
[0080]S0-5: Correct the estimation model based on the deviation evaluation result, returning to S0-3;
[0081]S1: Get a single-graphic image and a single line laser depth data;
[0082]S2-1: Use the estimated model to classify the single-graph image, divide the content of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com