

Master-slave tracking control method for minimally invasive surgery robot
A minimally invasive surgery, tracking control technology, applied in surgical robots, surgical manipulators, computer-aided medical procedures, etc., can solve problems such as poor accuracy, low precision, and poor real-time performance, and achieve the effect of simplifying complexity and improving real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The main operating arm used in the present invention is the doctor's mechanical arm in the utility model patent whose authorized announcement number is CN210872029U, and the name is called the doctor's operating table. The applied slave operating arm is a mechanical arm with the patent number 201711314221.6 and the name is the main operating arm for minimally invasive surgery.
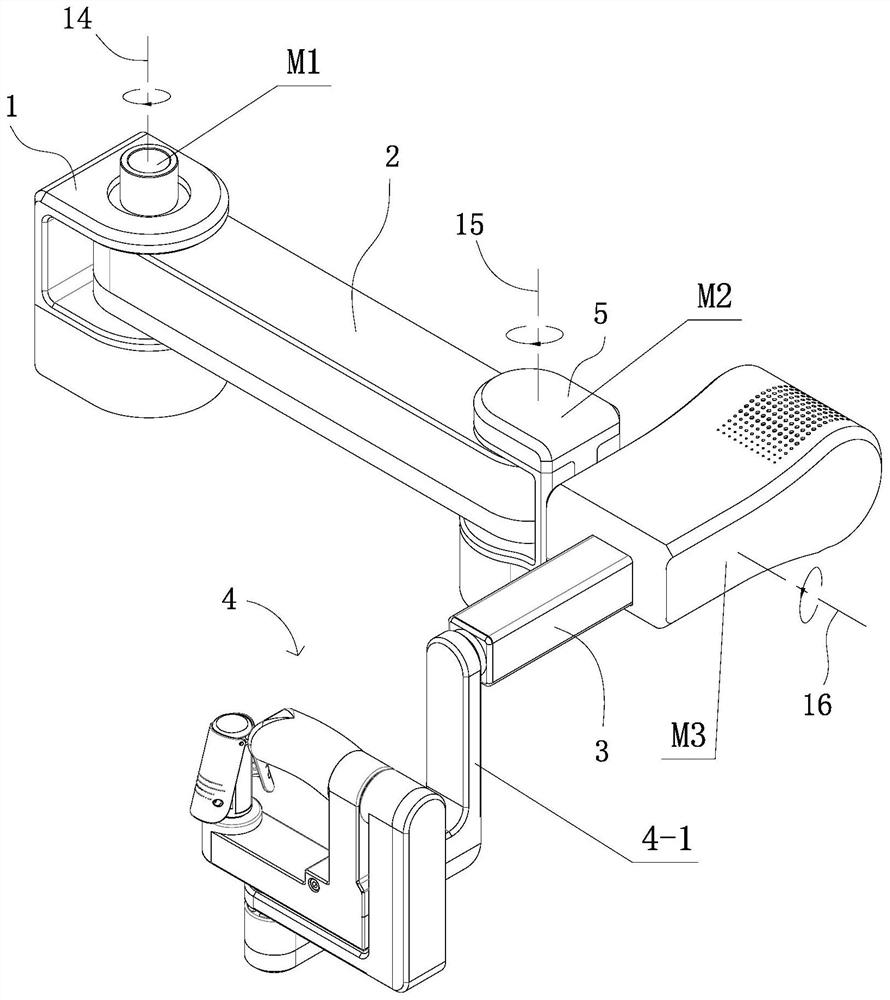
[0056] Such as figure 1 In the main operating arm shown, the rear end of the first arm 2 is connected to the base 1 through the first joint, the first arm 2 can rotate on the horizontal plane, and the rotation connecting seat 5 and the front end of the first arm 2 pass through the first joint. The two joints are connected, the rotating connecting seat 5 can rotate on the horizontal plane, the second arm 3 is connected to the rotating connecting seat 5 through the third joint, and the second arm 3 can rotate on the vertical plane.
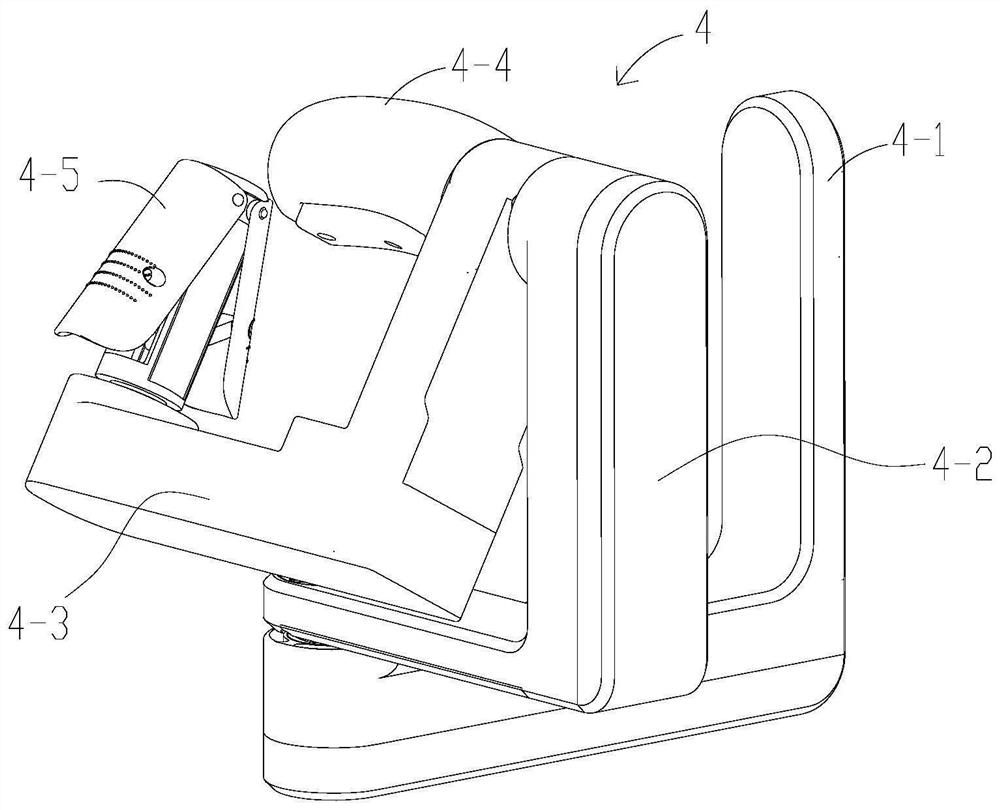
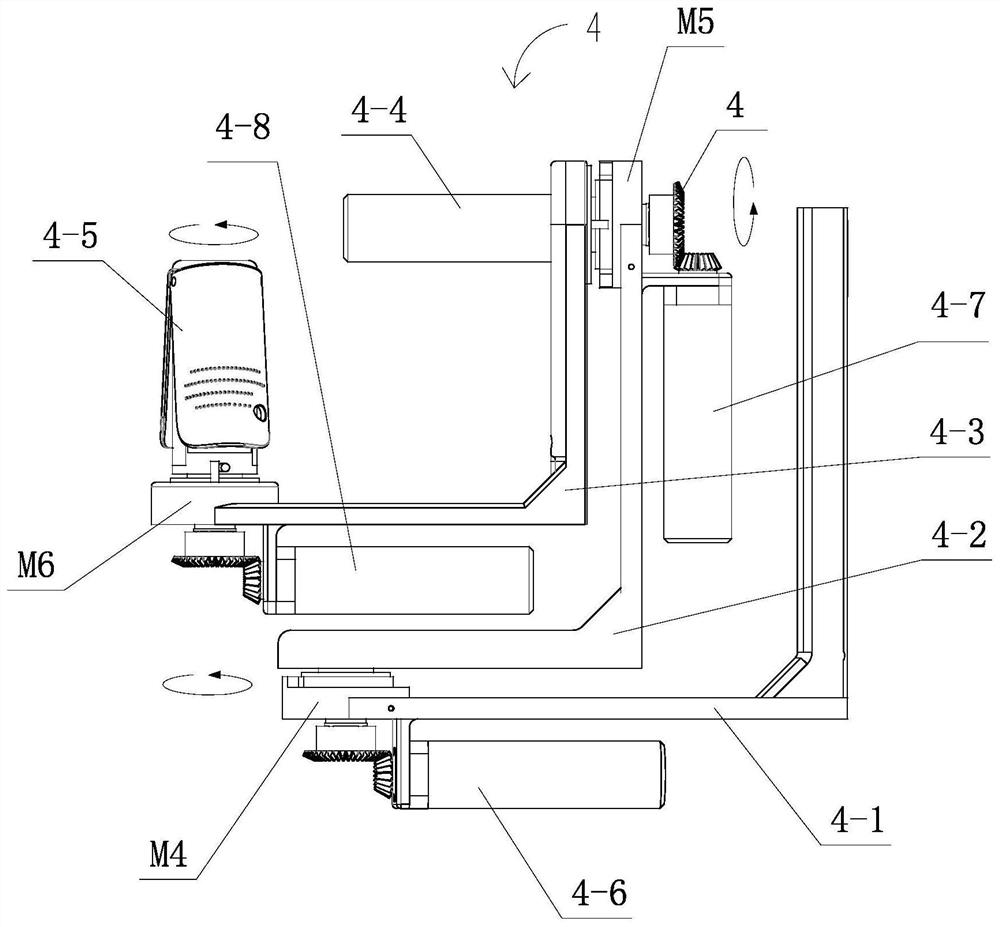
[0057]During the operation, the doctor holds the wrist 4 with h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More