Multi-stage series connection type distributed control system of robot
A control system and serial technology, applied in the direction of comprehensive factory control, manipulators, manufacturing tools, etc., can solve the problems of inability to adjust circuit boards, inconvenient installation of circuit boards, etc., and achieve the effect of being easy to fully utilize, easy to operate, and ensure stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
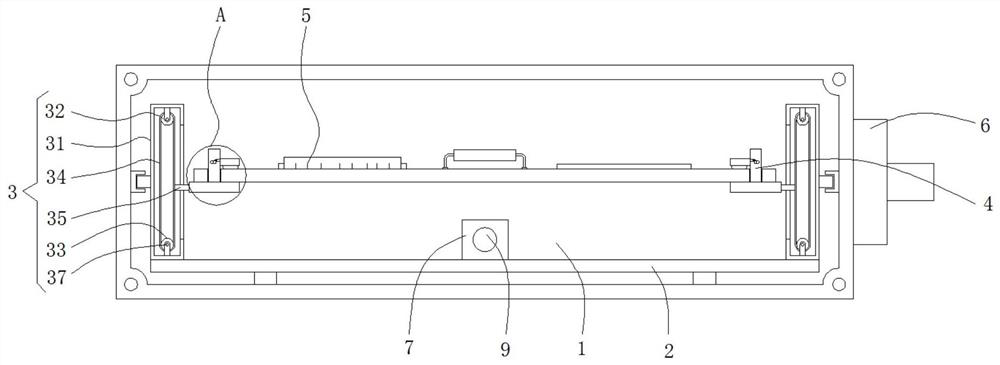
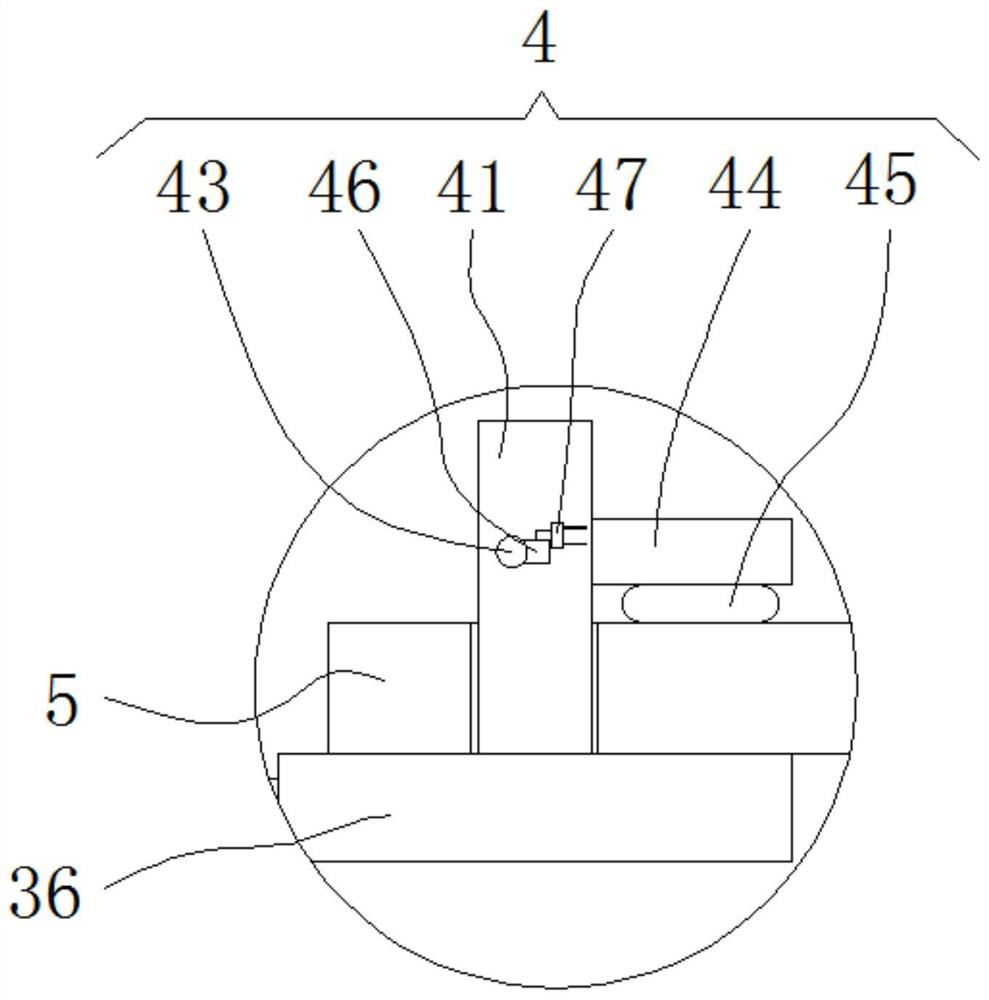
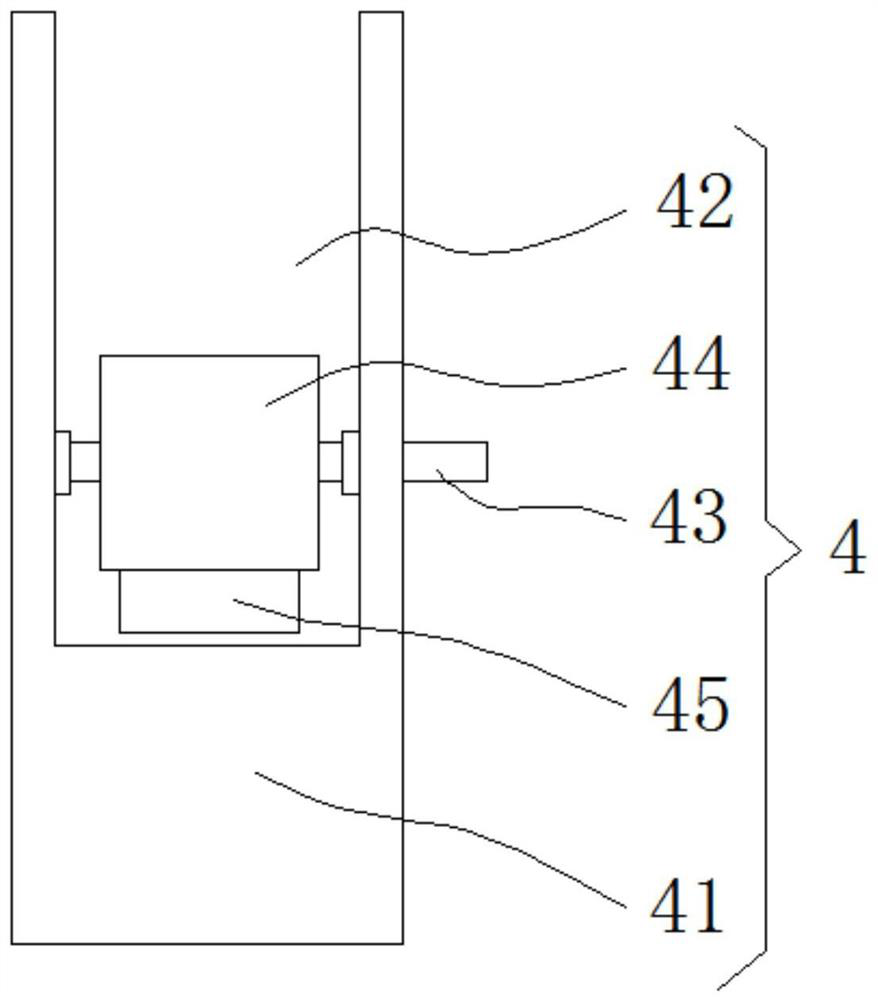
[0030] Please refer to figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 ,in, figure 1 A structural schematic diagram of a preferred embodiment of the robot multi-stage series distributed control system provided by the present invention; figure 2 for figure 1 shown figure 1 Partial enlarged view of A in the center; image 3 for figure 2 The structural side view of the connection block shown; Figure 4 for figure 1 The structural external view of the drive box shown; Figure 5 for figure 1 The structural exterior view of the housing shown. The multi-level series distributed control system of the robot includes:
[0031] Housing 1, the bottom of the inner wall of the housing 1 is slidably connected to a sliding plate 2, and both sides of the top of the sliding plate 2 are fixedly connected to a driving structure 3, and the two driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More