

Mooring flight mechanical arm based on mooring rope tension control and mooring rope tension control method
A pulling force control and robotic arm technology, which is applied to ground devices for mooring aircraft, program-controlled manipulators, and manipulators, etc., can solve the problems of reduced aircraft stability, short single flight time, and large inertia of the moving arm. The effect of prolonging aerial work time, improving operational flexibility and improving flight quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
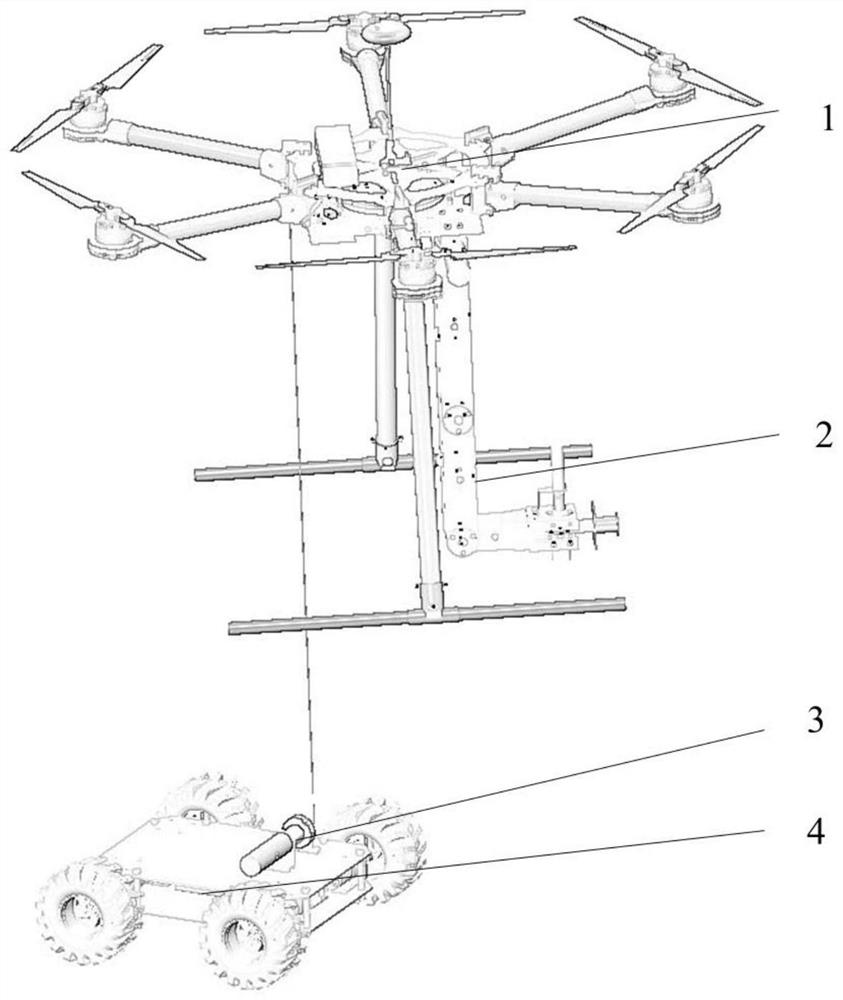
[0035] like figure 2 As shown in the figure, a tethered flying manipulator based on cable tension control of the present invention includes an aircraft 1, a ground station, a manipulator 2, a rope drive device, and a mooring control device 3. The aircraft 1 adopts a multi-rotor aircraft, and the manipulator 2 and the mooring control device 3 are respectively arranged on both sides of the center of the bottom of the multi-rotor aircraft 1. The starting position of the mechanical arm 2 is a certain distance away from the center of the bottom of the multi-rotor aircraft 1, and is located on the same side of the aerial working position, which can effectively Increase the maximum extension distance of the flying manipulator to better meet aerial operations. In order to balance the torque generated by the manipulator 2 by the mooring cable 31 , the interface between the mooring cable 31 and the multi-rotor aircraft 1 is arranged on the opposite side of the manipulator 2 .
[0036]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More