

Coupling bionic foot pad for improving ground contact stability of leg-foot type robot
A robot and stability technology, applied in the field of bionic foot pads, can solve problems such as poor performance of foot pads and poor stability of robot feet touching the ground
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
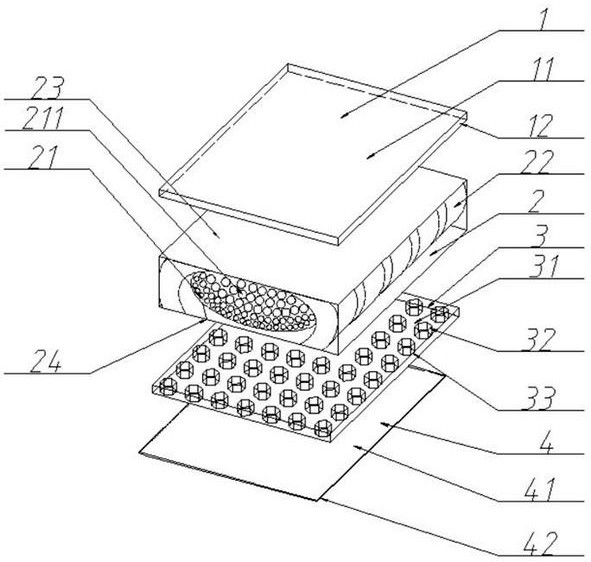
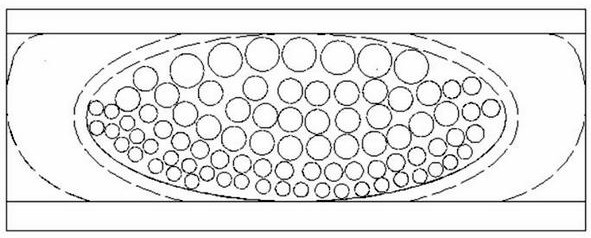
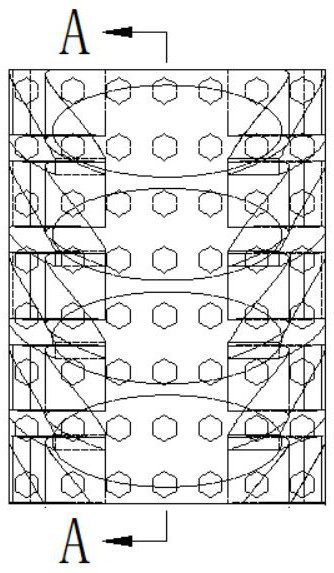
[0031] see Figure 1 to Figure 7 As shown, a coupled bionic foot pad that improves the stability of a leg-footed robot touching the ground includes a base layer 1 of the bionic foot pad, a middle layer 2 of the bionic foot pad, a lower layer 3 of the bionic foot pad and a surface layer 4 that touches the ground;
[0032] The bionic foot pad base layer 1 selects materials with mechanical properties equivalent to the plantar fascia rigidity, such as: Ecoflex0050 silica gel, etc. The thickness of the bionic foot pad base layer 1 is 1 ± 0.5mm; the upper surface 11 of the base layer and the lower surface 12 of the base layer are coated with flexible Adhesive is bonded to the surface of the sole of the robot and the upper surface 23 of the middle layer of the bionic foot pad respectively; due to the high rigidity of the base layer, it can not only prevent excessive deformation of the bionic foot pad, improve the durability of the material, but also make the bionic foot pad more durab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More