

AGV automatic loading method
An automatic and compartment technology, applied in the direction of measuring devices, optical devices, image data processing, etc., can solve the problems of unfixed cargo placement, difficult cargo information entry system unified management, unclear cargo types, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
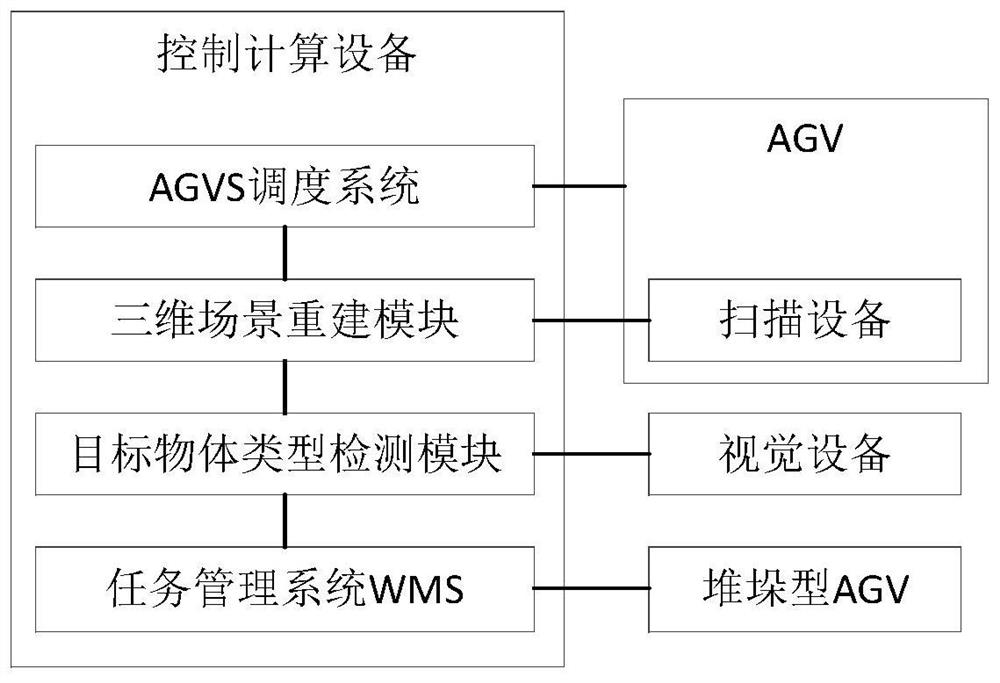
[0045] Embodiment: The application provides an AGV automatic loading method, which is applied to include figure 1 In the shown control computing equipment, AGV with scanning equipment, vision equipment, and stacking AGV system, the control computing equipment integrates the AGVS scheduling system, the 3D scene reconstruction module, the target object type detection module, and the task management system WMS. .
[0046] The control computing device is a device with data processing and signal transceiving functions, which can be a computer.
[0047] Optionally, the scanning device, the AGV installed with the scanning device, the vision device, and the stacking AGV can implement wired communication or wireless communication with the control computing device.
[0048] Optionally, the scanning device includes at least a laser sensor or a vision sensor.
[0049] Optionally, the laser sensor includes a single-line laser radar, and the installation direction of the single-line laser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More