

Unmanned aerial vehicle swarm air matrix seedling sowing system based on Beidou precise navigation and control method thereof
A technology of drones and drone colonies, applied in planting methods, radio wave measurement systems, three-dimensional position/channel control, etc., can solve problems such as low mechanization level, uneven seed distribution, and poor stability of plant protection drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and embodiments. It should be noted that the specific embodiments of the present invention are only for the purpose of describing the technical solution more clearly, but not as a limitation of the protection scope of the present invention.
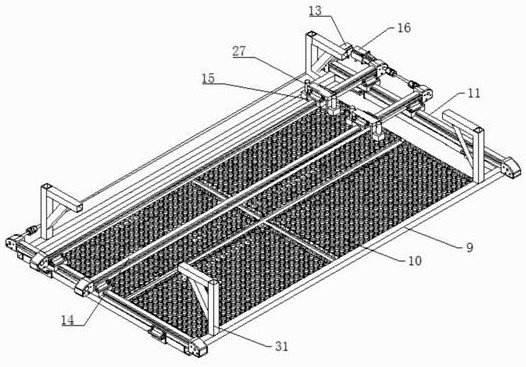
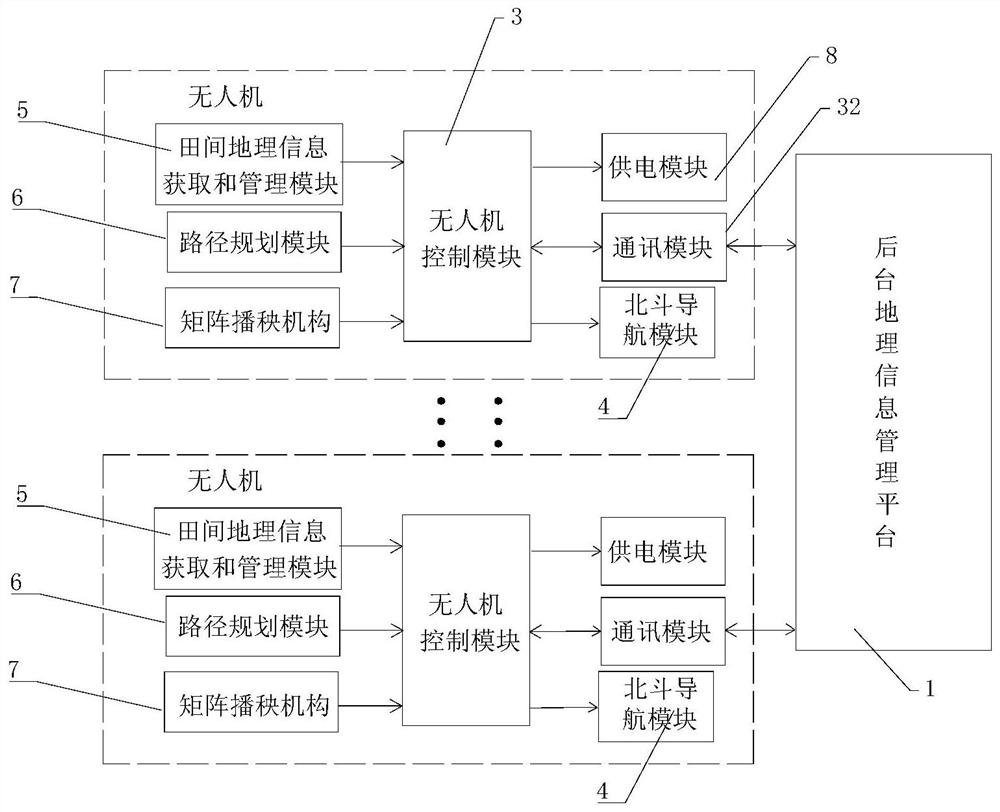
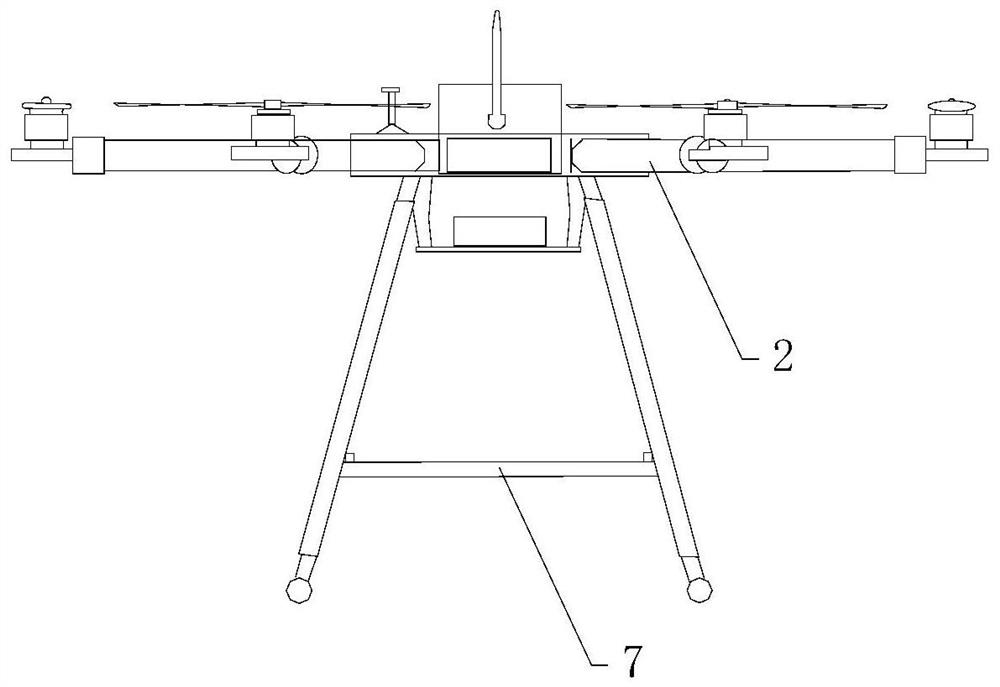
[0040] see Figure 1-Figure 11 , a UAV swarm air matrix seedling planting system based on Beidou precision navigation, including a swarm composed of several UAVs, the several UAVs are connected through a background geographic information management platform 1; the unmanned The drone includes a UAV body 2, a UAV control module 3, and a Beidou navigation module 4 electrically connected to the UAV control module 3 for precise navigation, field geographic information acquisition and The management module 5, the path planning module 6 for planning the seedling sowing path, the matrix seedling sowing mechanism 7 for realizing seedling sow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More