

Multi-sensor fusion sensing method and system for automatic driving under extreme working condition
A multi-sensor fusion and automatic driving technology, which is applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve problems such as fault tolerance or robustness of fusion systems that are not well resolved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
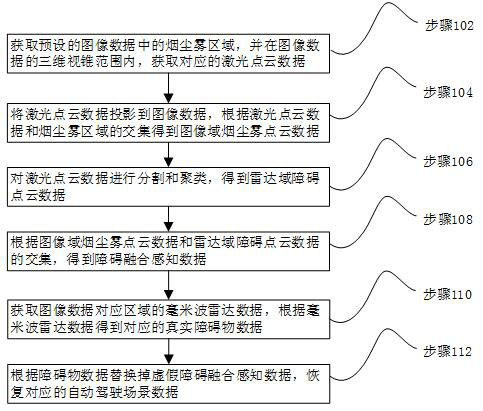
[0049] In one embodiment, such as figure 1 As shown, a multi-sensor fusion perception method for autonomous driving under extreme working conditions is provided, including the following steps:
[0050] Step 102, acquire the smoke and dust area in the preset image data, and acquire the corresponding laser point cloud data within the range of the three-dimensional viewing cone of the image data.
[0051] Since the visible light camera has rich texture information, it can initially locate the smoke and dust area based on the apparent information in the acquired image data, b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More