

Automatic driving controller and training method based on variational auto-encoder and reinforcement learning
A technology of reinforcement learning and autoencoder, which is applied in neural learning methods, integrated learning, biological neural network models, etc., can solve problems such as low learning efficiency, low state space exploration rate, and large state quantity space, so as to improve convergence Effects of speed, accelerated exploration, increased exploration rate, and learning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
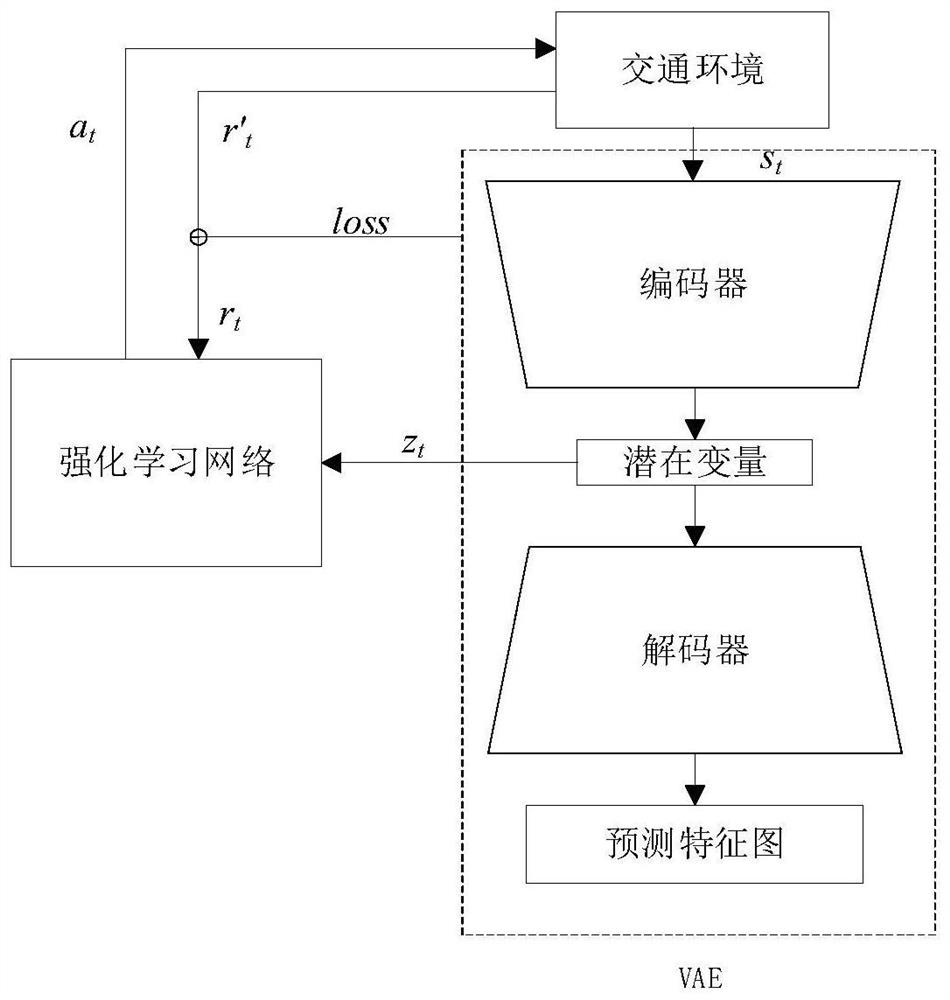
[0039] figure 1It is a framework diagram of an automatic driving algorithm model based on variational autoencoder and reinforcement learning. The method of the present invention includes two parts of variational autoencoder (VAE) and reinforcement learning network (RL-net), as follows:
[0040] 1) A variational autoencoder (VAE) includes an encoder and a decoder.
[0041] The input of the encoder is the environmental state quantity s with timing information t , output as latent variable z t ; The input of the decoder is the latent variable feature z t , the output is the predicted feature at the next moment.
[0042] 2) Preferably, the reinforcement learning network (RL-net) is an actor-critic algorithm.
[0043] The input of the reinforcement learning network ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More