Environment fusion system and method suitable for man-machine interaction operation of underwater remote control robot
An underwater robot and human-computer interaction technology, applied in the field of environmental fusion systems, can solve the problems of reduced operating efficiency and accuracy, operator fatigue and tension, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
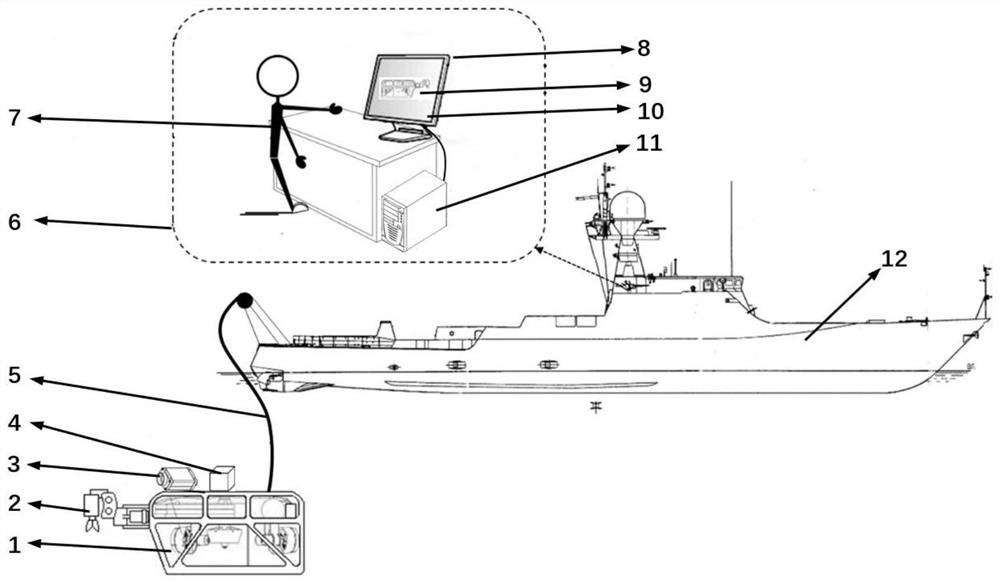
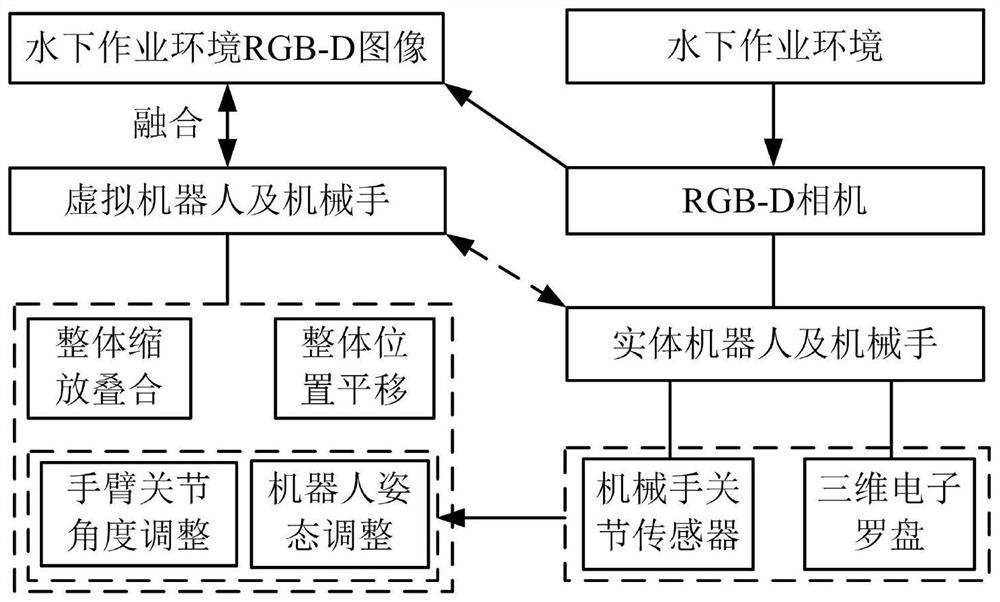
[0034] see Figure 1 ~ Figure 2 , an environment fusion system suitable for human-computer interaction operations of underwater remote control robots, including a mother ship, a computer, a display, an RGB-D camera, a three-dimensional electronic compass, an underwater robot and a manipulator, and an umbilical cable. The RGB-D camera is mounted on On the body cabin of the underwater robot, the three-dimensional electronic compass is mounted in the body cabin of the underwater robot; Attitude data, scene RGB-D images; monitors are used to display computer-generated virtual robots and manipulators, and background RGB-D images of operating scenes; umbilical cables are used to transmit commands and data between computers and underwater manipulators. In the process of man-machine interaction, the system of the present invention continuously repeats the fifth to eighth steps above, so that the virtual robot and manipulator are always integrated with the RGB-D image of the underwater...
Embodiment 2
[0036] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0037]This embodiment is suitable for the environment fusion system of the human-computer interaction operation of the underwater remote control robot, as follows:
[0038] (1) A virtual robot and manipulator exactly the same as the underwater physical robot and manipulator are constructed in the computer in the operating cabin of the mother ship, and are displayed on the screen for the operator to watch during operation. The operator can interact with the virtual robot and manipulator on the screen in various ways;
[0039] (2) The body cabin of the underwater robot is equipped with an RGB-D three-dimensional camera to obtain a two-dimensional image of the underwater operating environment and a three-dimensional point cloud image of the scene, i.e. an RGB-D image, and simultaneously move the underwater robot arm horizontally Stretch to the longest limit position to ensure...
Embodiment 3
[0048] This embodiment is basically the same as the above-mentioned embodiment, and the special features are as follows:
[0049] An environment fusion method suitable for the human-computer interaction operation of the underwater remote control robot is operated, and the operation steps are as follows:
[0050] Step 1: Turn on the equipment, including the computer, display screen, underwater physical robot and manipulator, RGB-D camera, and 3D electronic compass, to ensure that the equipment is normal, and the virtual robot that is exactly the same as the underwater physical robot and manipulator is displayed on the screen and manipulators. The operator can interact with the virtual robot and manipulator in various ways;
[0051] Step 2: Extend the underwater manipulator horizontally to the longest position. The RGB-D three-dimensional camera is installed on the body of the underwater robot to obtain part of the manipulator—the forearm and the grasping part and two-dimension...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap