

Rigid body positioning method for non-line-of-sight parameter estimation
A positioning method and non-line-of-sight technology, which is applied in the field of communication, can solve the problems of not considering the influence of non-line-of-sight transmission rigid body positioning performance, and difficult to meet the actual application environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
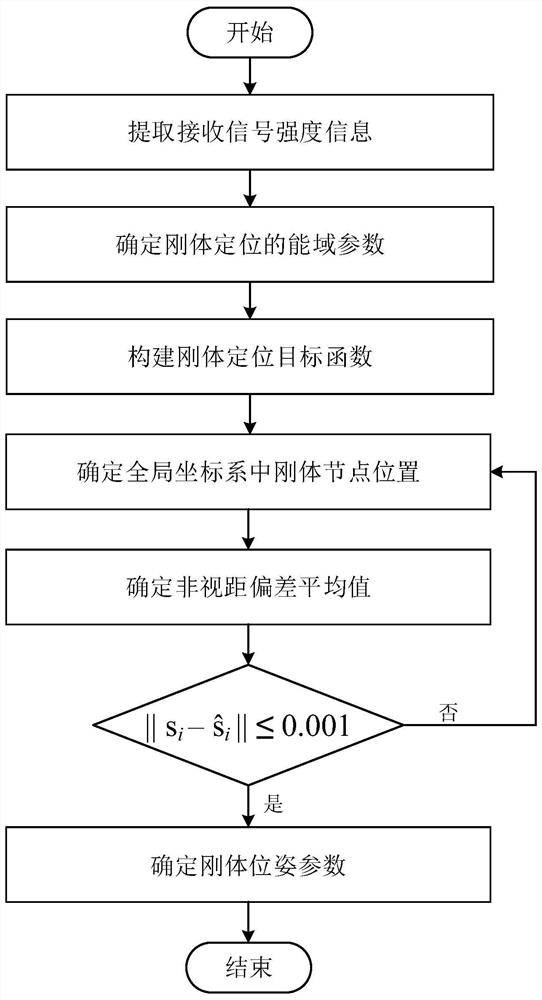
[0078] The rigid body positioning method oriented to non-line-of-sight parameter estimation in this embodiment consists of the following steps (see figure 1 ):
[0079] (1) Extract received signal strength information
[0080] According to the rigid body positioning model in the non-line-of-sight transmission environment, the anchor node is used to locate the rigid body target. The positioning method is as follows.
[0081] The m-th anchor node extracts the received signal strength information P in the energy domain of rigid body positioning from the wireless signal transmitted by the i-th rigid body node mi :
[0082]
[0083] where a m Indicates the position coordinates of the anchor node in the three-dimensional global coordinate system, a m for [x m ,y m ,z m ] T , m is 1, 2,..., M, M is the number of anchor nodes, and the value of M is a positive integer ≥ 4, and the value of M in this embodiment is 5; s i Indicates the position coordinates of the rigid body n...
Embodiment 2
[0138] In this embodiment, the rigid body positioning method for non-line-of-sight parameter estimation consists of the following steps:
[0139] (1) Extract received signal strength information
[0140] According to the rigid body positioning model in the non-line-of-sight transmission environment, the anchor node is used to locate the rigid body target. The positioning method is as follows.
[0141] The m-th anchor node extracts the received signal strength information P in the energy domain of rigid body positioning from the wireless signal transmitted by the i-th rigid body node mi :
[0142]
[0143] where a m Indicates the position coordinates of the anchor node in the three-dimensional global coordinate system, a m for [x m ,y m ,z m ] T , m is 1, 2,..., M, M is the number of anchor nodes, and the value of M is a positive integer ≥ 4, and the value of M in this embodiment is 5; s i Indicates the position coordinates of the rigid body node in the three-dimensi...
Embodiment 3
[0146] In this embodiment, the rigid body positioning method for non-line-of-sight parameter estimation consists of the following steps:
[0147] (1) Extract received signal strength information
[0148] According to the rigid body positioning model in the non-line-of-sight transmission environment, the anchor node is used to locate the rigid body target. The positioning method is as follows:
[0149] The m-th anchor node extracts the received signal strength information P in the energy domain of rigid body positioning from the wireless signal transmitted by the i-th rigid body node mi :
[0150]
[0151] where a m Indicates the position coordinates of the anchor node in the three-dimensional global coordinate system, a m for [x m ,y m ,z m ] T , m is 1, 2,..., M, M is the number of anchor nodes, and the value of M is a positive integer ≥ 4, and the value of M in this embodiment is 4; s i Indicates the position coordinates of the rigid body node in the three-dimensi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More