Airborne laser radar system integration error calibration method based on overlapped air strip conjugate primitives
An airborne laser radar and system integration technology, applied in the field of data processing, can solve the problems of lack of integrated calibration of offset system and low accuracy of laser radar data measurement, and achieve the effect of improving accuracy and being easy to implement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
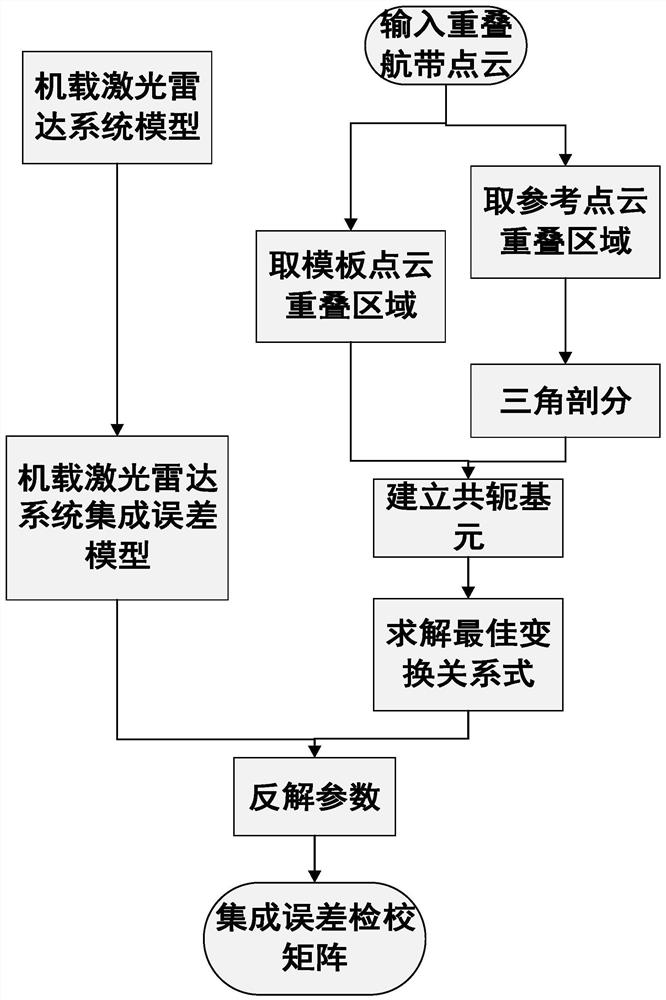
[0020] Specific implementation mode 1: In this implementation mode, the specific process of the integrated error checking method of the airborne lidar system based on the conjugate primitives of the overlapping flight belts is as follows:
[0021] Step 1: According to the airborne lidar acquisition principle, establish the mathematical model of the airborne lidar system;
[0022] Step 2: Based on the mathematical model of the airborne lidar system established in step 1, an integrated error model of the airborne lidar system is established;
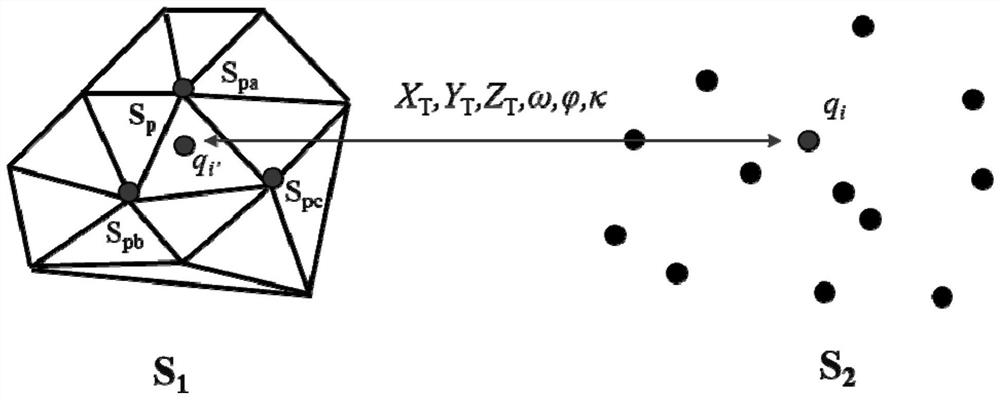
[0023] Step 3: Establish the conjugate primitive between the reference point cloud and the template point cloud, and solve the optimal transformation relation between the overlapping flight belt point clouds;
[0024] Step 4: According to the relationship between the optimal change relation between the point clouds of overlapping flight belts and the system integration error model, the inverse solution is obtained to obtain the system inte...
specific Embodiment approach 2
[0025] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in the said step 1, according to the airborne laser radar collection principle, establish the mathematical model of the airborne laser radar system; The specific process is:
[0026] According to the principle of lidar imaging, the mathematical model of the airborne lidar system is established;
[0027] For the laser beam collected instantaneously by the laser radar, the mathematical model of the airborne laser radar system is established, and the model is as follows:
[0028]
[0029] The coordinates of the laser point in the laser radar coordinate system are P L =(x L ,y L ,z L ) T , the coordinates of the laser point in the inertial platform reference coordinate system are P I =(x I ,y I ,z I ) T ;
[0030] R A It is the placement angle rotation matrix of the UAV lidar system, which is used to describe the relative space angle and rotation relationship of the...
specific Embodiment approach 3
[0036] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the arrangement angle rotation matrix R A The specific expression is as follows:
[0037]
[0038] Among them, R(ω), and R(κ) are yaw angle ω(Heading), pitch angle And the rotation matrix of the roll angle κ (Roll).
[0039] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap