Shipborne laser radar obstacle detection method based on variable-size grid map
An obstacle detection and grid map technology, applied in the field of lidar obstacle detection, can solve problems such as low obstacle detection accuracy, and achieve the effect of solving the problem of reducing detection accuracy, solving missed detection and target splitting, and accurately detecting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
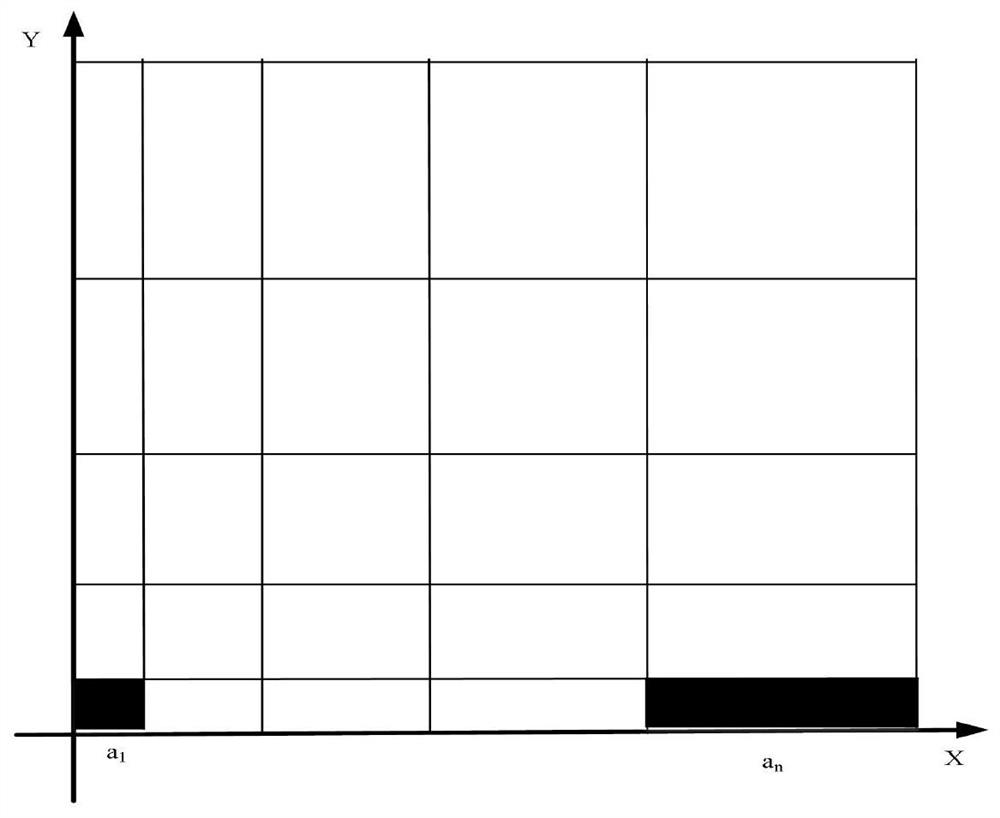
[0040] Step 1, in the embodiment of the present invention, the model of the selected lidar is RS-16, its horizontal field of view is 360°, the vertical field of view is ±15°, the horizontal angle resolution is 0.2°, the vertical angle The resolution is 2°, the ranging capability is 150m, the detection accuracy is ±2cm, and the installation height is 1.3m. Combined with the detection performance of the lidar itself and the installation height, set the grid map size, grid size growth range, height difference threshold, quantity threshold, and height threshold involved in the above steps as follows: R = 300 (m), a 1 = 1(m), a n =5(m), η=0.15(m), α=3, H t = 3(m).
[0041] Step 2, after the size of the grid map and the growth range of the grid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More