Distributed reinforcement learning social navigation method based on image hidden variable probability model
A probabilistic model and reinforcement learning technology, applied to instruments, adaptive control, control/regulation systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] The present invention will be further elaborated and illustrated below in conjunction with the accompanying drawings and specific embodiments. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
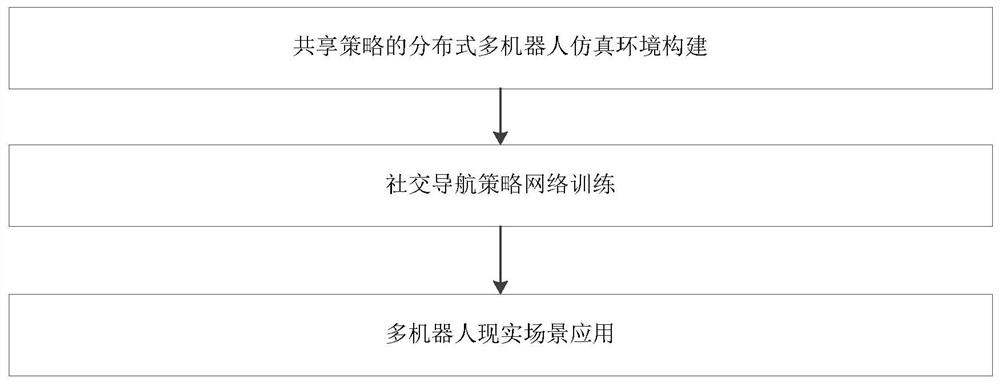
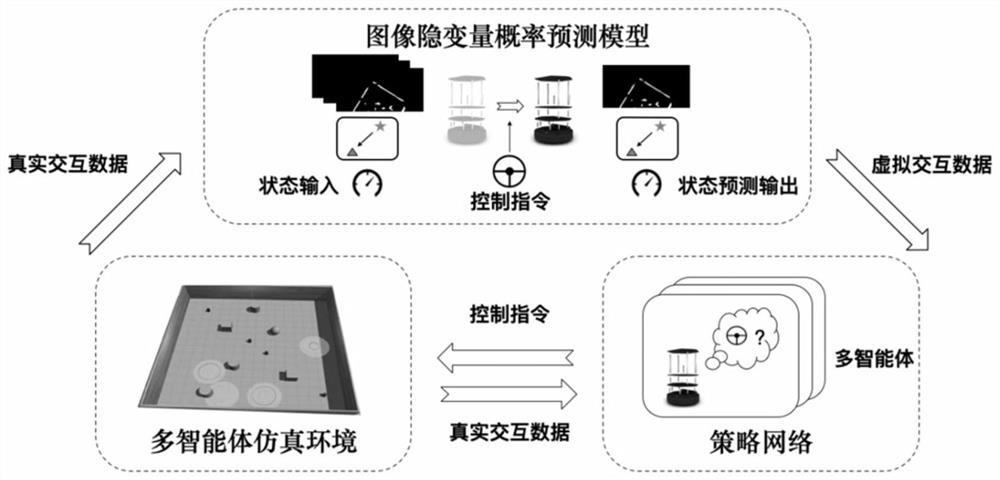
[0062] In a preferred embodiment of the present invention, a distributed reinforcement learning social navigation method based on image hidden variable probability model is provided,
[0063] Existing reinforcement learning social navigation methods learn desired social navigation policies through extensive trial-and-error for mobile robots in the environment. Since physical experiments will pose a threat to the safety of pedestrians, and the cost of physical robots is relatively high, this type of method generally chooses to perform training iterations in a simulation environment. However, the reinforcement learning algorithm still has shortcomings such as time-co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com