

Unmanned underwater vehicle autonomous recovery control system and control method thereof
A technology of control system and main control system, applied in the direction of control/regulation system, height or depth control, non-electric variable control, etc., can solve problems such as disturbance, low recovery efficiency, troublesome underwater vehicle recovery, etc., and achieve improvement Convergence speed, reduce jitter phenomenon, reduce the effect of mechanical wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
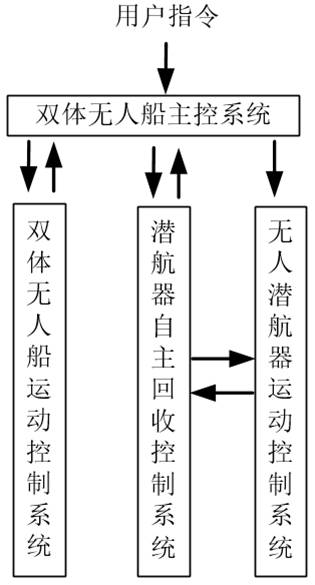
[0081] An autonomous recovery control system for an unmanned underwater vehicle, the schematic diagram of its logic flow is as follows: figure 1 As shown, including catamaran unmanned ship main control system, catamaran unmanned ship motion control system, submersible vehicle autonomous recovery control system, unmanned submersible vehicle motion control system; catamaran unmanned ship main control system is used to receive recovery instructions , and transmit the recovery command to the catamaran unmanned ship motion control system; the catamaran unmanned ship motion control system completes the dynamic positioning of the catamaran unmanned ship according to the recovery command, and feeds back the command to complete the dynamic positioning to the catamaran The main control system of the unmanned ship; the main control system of the catamaran unmanned ship sends a recovery and descent command to the autonomous recovery control system of the submersible according to the feedba...
Embodiment 2
[0140] A control method for the autonomous recovery control system of the unmanned underwater vehicle of embodiment 1, comprising the following steps:
[0141] Step 1. The main control system of the catamaran unmanned ship accepts the recovery command issued by the user, and transmits the recovery command to the motion control system of the catamaran unmanned ship. After receiving the recovery command, the catamaran unmanned ship motion control system The dynamic positioning of the catamaran is controlled by the environment, and the command to complete the dynamic positioning is fed back to the main control system of the catamaran unmanned ship;
[0142] Step 2. The main control system of the catamaran unmanned ship sends a recovery and descent command to the autonomous recovery control system of the submersible. The position information of the preparation point is sent to the motion control system of the UUV;
[0143] Step 3: The UUV motion control system plans the expected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More