

Orthopedic surgery robot control method based on kinetic model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
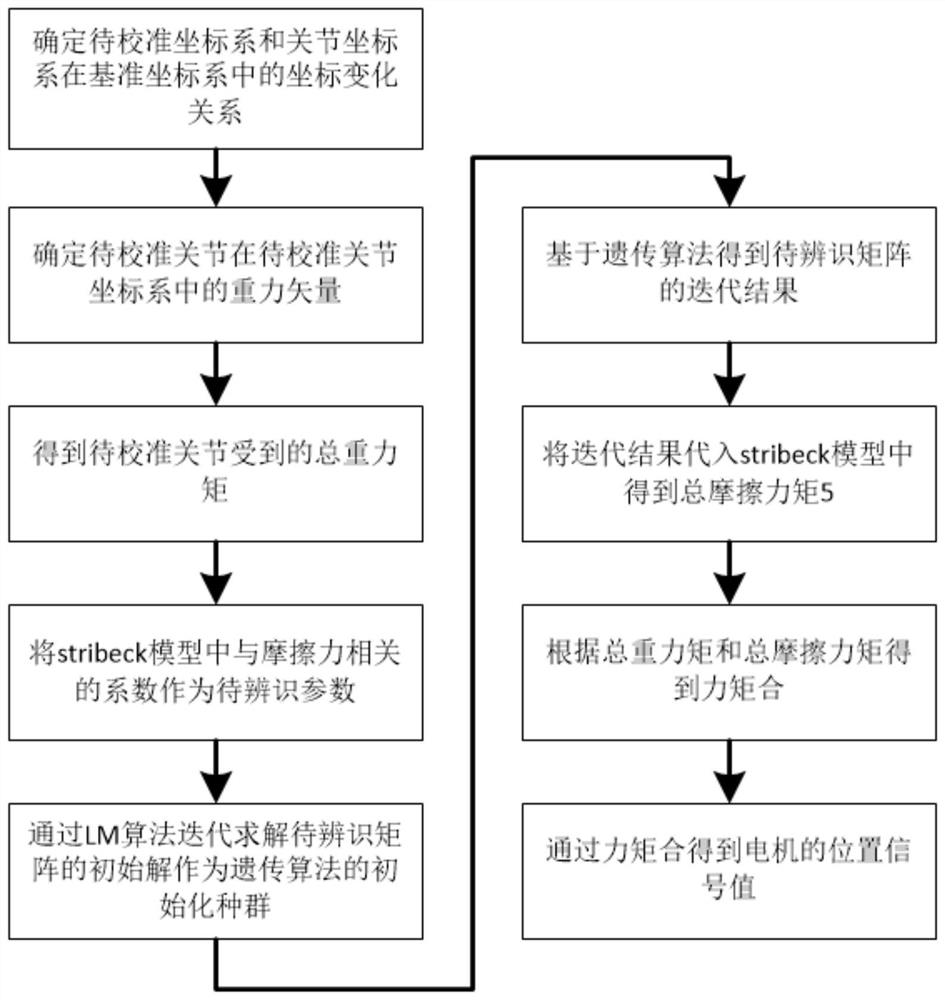
[0057] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0058] A dynamic model-based control method for orthopedic surgery robots, the processing flow is as follows figure 1 As shown, the orthopedic surgical robot includes a base and multiple joints installed on the base to drive the orthopedic surgical robot. Each joint is driven by its own motor, and each joint can be regarded as a rod, so each joint The joint coordinate system can be obtained, and the coordinates of different joints in different joint coordinate systems are different, so as to determine the coordinates of the joint coordinate system of the joint to be calibrated and the joint coordinate system of other joints in the reference coordinate system of the base The relationship between changes and the establishment of the joint coordinate system is a conventional method in the field of robotics. In this application, the D-H method i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More