

Man-machine interaction intelligent control method of load maneuvering exoskeleton and exoskeleton system
A technology of human-computer interaction and intelligent control, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems such as system instability and poor tracking performance of exoskeleton force, and achieve simplified position calculation, improved control performance, and dynamic balanced effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0088] This embodiment discloses a human-computer interaction intelligent control method for a mobile payload exoskeleton. The method is applied in the mobile payload exoskeleton system 100, so that the mobile payload exoskeleton system can realize coordinated movement with the human body.
[0089] The human-computer interaction intelligent control method includes the following steps:
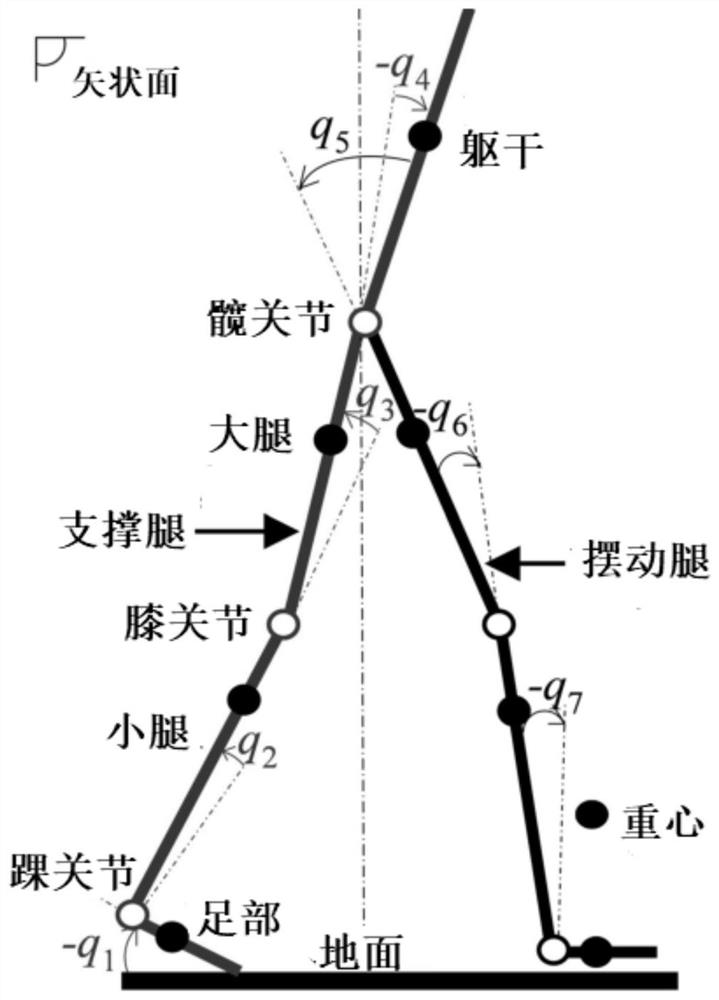
[0090] S1. Model the human body and the load-mobile exoskeleton as a 5-link model consisting of a torso, two left and right thighs, and two left and right calves. The 5-link model mainly focuses on the study of dynamic characteristics on the sagittal plane, and other planes are ignored due to the small range of motion and the insignificant impact on the dynamics of the exoskeleton system. The 5-link model can be found in figure 1 , figure 1 The left leg in the figure is the support leg, the right leg is the swing leg, q 1 ~q 7 Represent the rotation angles of each part or joint position res...
Embodiment 2
[0162] This embodiment discloses a computer-readable storage medium, which stores a program. When the program is executed by a processor, the human-computer interaction intelligent control method of the load-driven exoskeleton described in Embodiment 1 is realized, specifically as follows:
[0163] S1. Model the human body and the mobile exoskeleton as a 5-link model consisting of a torso, two left and right thighs, and two left and right calves;
[0164] S2. According to the characteristics of the walking of the human body as a cyclical and reciprocating process of the supporting phase and the swinging phase of the two legs, the 5-link model is divided into two subsystems: the supporting leg model and the swinging leg model, and then use the Lagrangian motion equation, Establish the dynamic equations of the supporting leg model and the swinging leg model respectively;
[0165] S3. Design a hybrid control method combining position control and tracking differentiator-based AIA ...
Embodiment 3
[0168] This embodiment discloses a computing device, including a processor and a memory for storing executable programs of the processor. When the processor executes the program stored in the memory, the human body with a mobile-loaded exoskeleton described in Embodiment 1 is realized. The computer interactive intelligent control method is as follows:
[0169] S1. Model the human body and the mobile exoskeleton as a 5-link model consisting of a torso, two left and right thighs, and two left and right calves;
[0170] S2. According to the characteristics of the walking of the human body as a cyclical and reciprocating process of the supporting phase and the swinging phase of the two legs, the 5-link model is divided into two subsystems: the supporting leg model and the swinging leg model, and then use the Lagrangian motion equation, Establish the dynamic equations of the supporting leg model and the swinging leg model respectively;
[0171] S3. Design a hybrid control method c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More