

Five-degree-of-freedom parallel mechanism with double-acting platform and ship-borne stabilized platform
A technology for a double-action platform and a stable platform, applied in the directions of ships, ship parts, cargo handling equipment, etc., can solve the problems of inability to stabilize the platform position and complete control of attitude, easy interference of branch chains, poor load capacity, etc. The effect of similar structure between branches and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
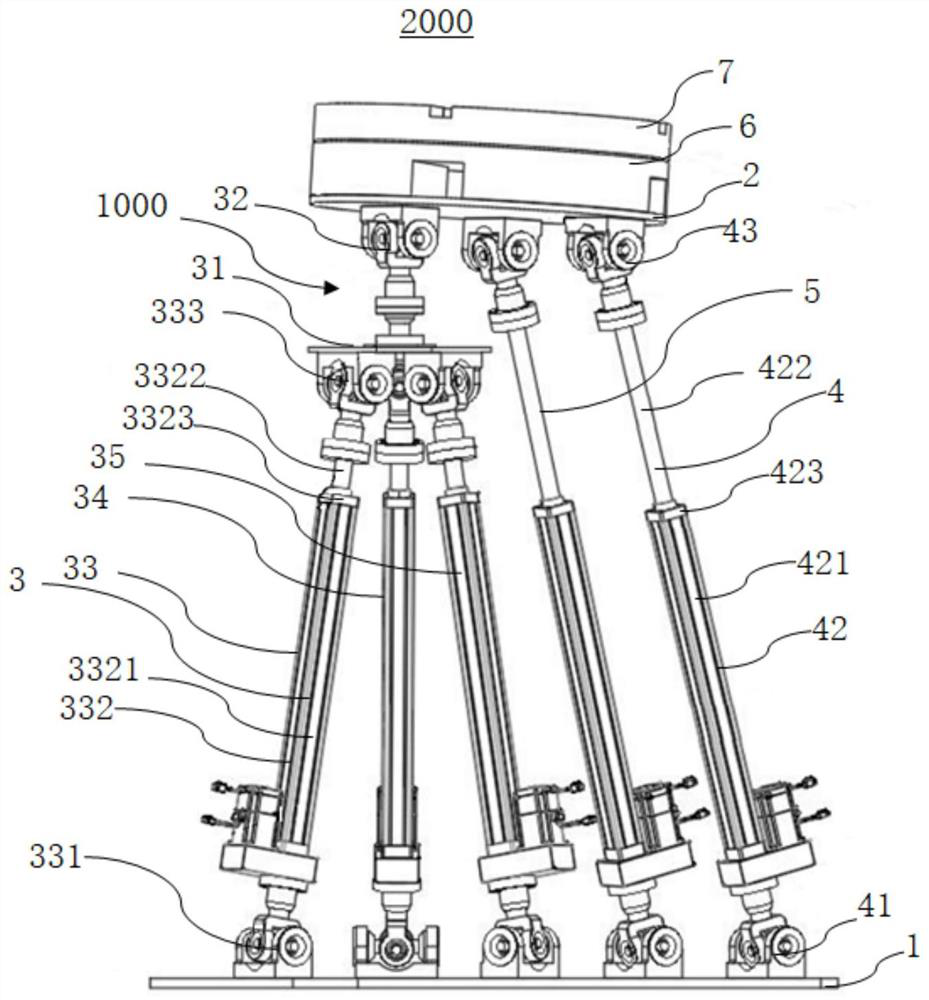
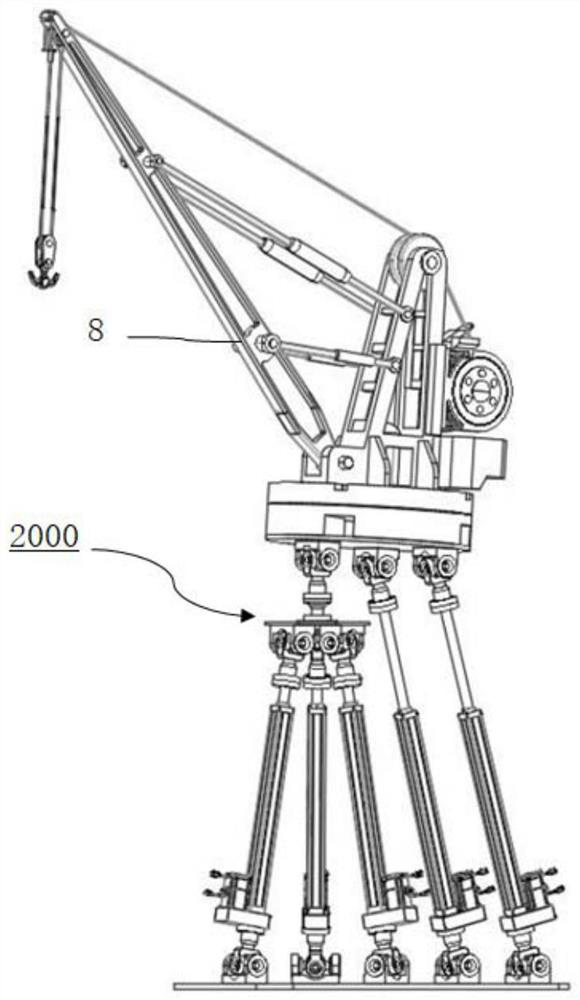
[0039] Combine below Figure 1 to Figure 2 A five-degree-of-freedom parallel mechanism 1000 with a dual-motion platform and a shipboard stable platform 2000 according to an embodiment of the present invention will be described.
[0040] Such as figure 1 As shown, the first aspect of the present invention proposes a five-degree-of-freedom parallel mechanism 1000 with a double-moving platform.
[0041] The five-degree-of-freedom parallel mechanism 1000 with a double moving platform according to the embodiment of the first aspect of the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More