

Spatial calibration method for rotary three-dimensional measurement system of two-dimensional laser range finder
A calibration method and 3D measurement technology, applied in radio wave measurement systems, instruments, etc., can solve the problems of 3D point cloud image error and distortion, and achieve the effect of improving reconstruction accuracy and high calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with specific illustrations:
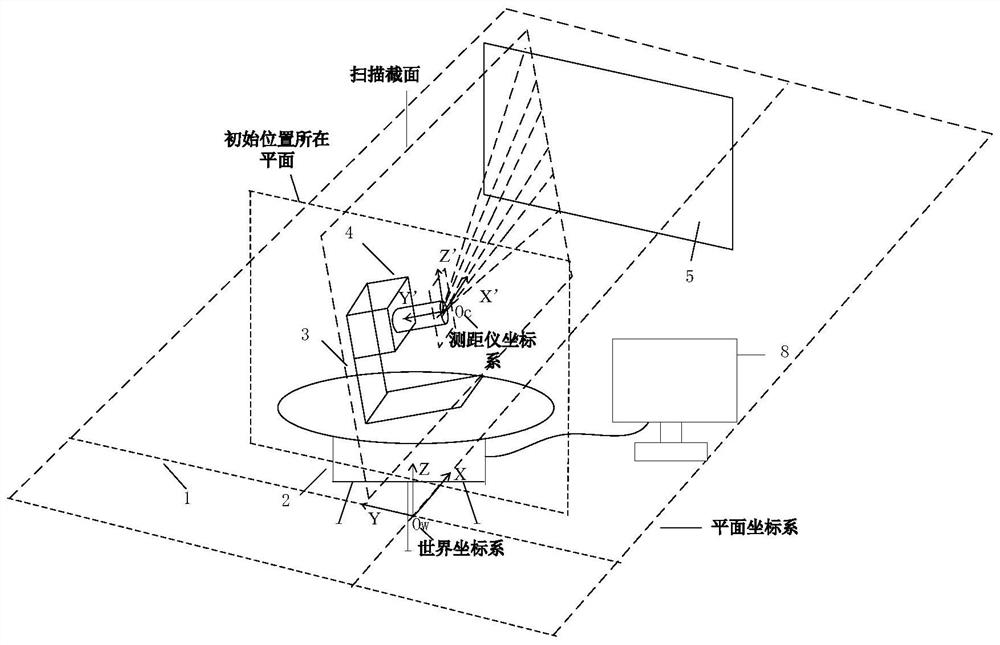
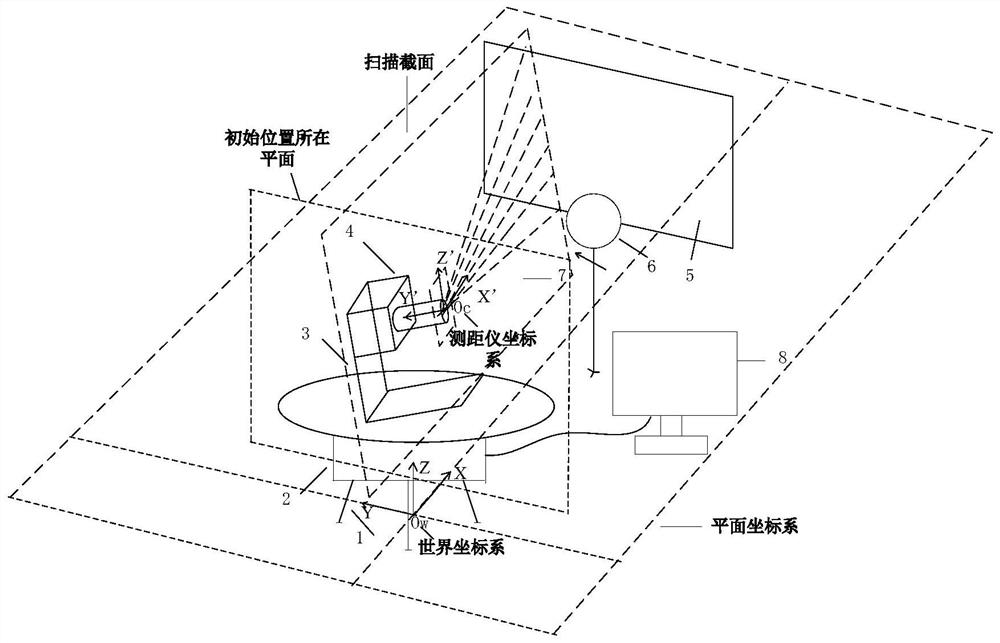
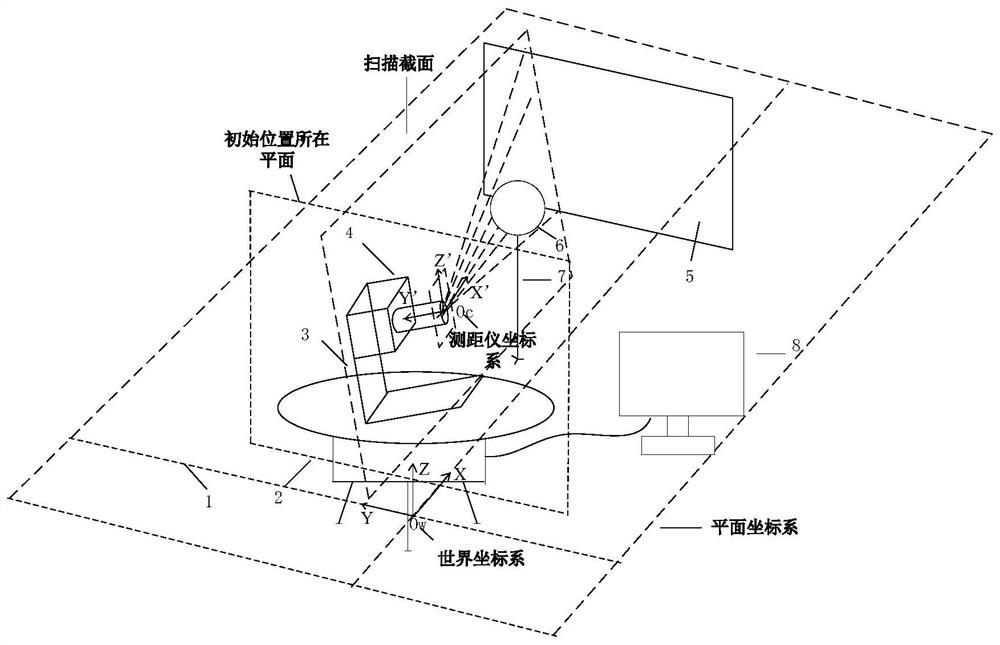
[0074] Such as figure 1 As shown, the research object of the present invention is a two-dimensional laser range finder rotating three-dimensional measurement system, including a data acquisition module, an acquisition auxiliary module and a data analysis and processing module. Wherein the data acquisition module includes a two-dimensional laser rangefinder 4 and a known radius of 15 cm ball 6; the acquisition auxiliary module includes a plane coordinate system drawing, a cloud platform support frame 1, and a horizontal rotating cloud arranged on the support frame Platform 2 and the sensor bracket 3 fixed on the cloud platform, a non-transparent auxiliary plane 5 and a support rod 7 that can adjust any height and scale, the two-dimensional laser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More