Four-degree-of-freedom parallel mechanism and industrial robot
An industrial robot and degree of freedom technology, which is applied in the direction of manipulators, manufacturing tools, program control manipulators, etc., can solve the problems of large cumulative error of series manipulators, accompanying movement of parallel mechanisms, and low structural strength, etc., to achieve easy motion control and high precision Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention and should not be construed as limiting the present invention.
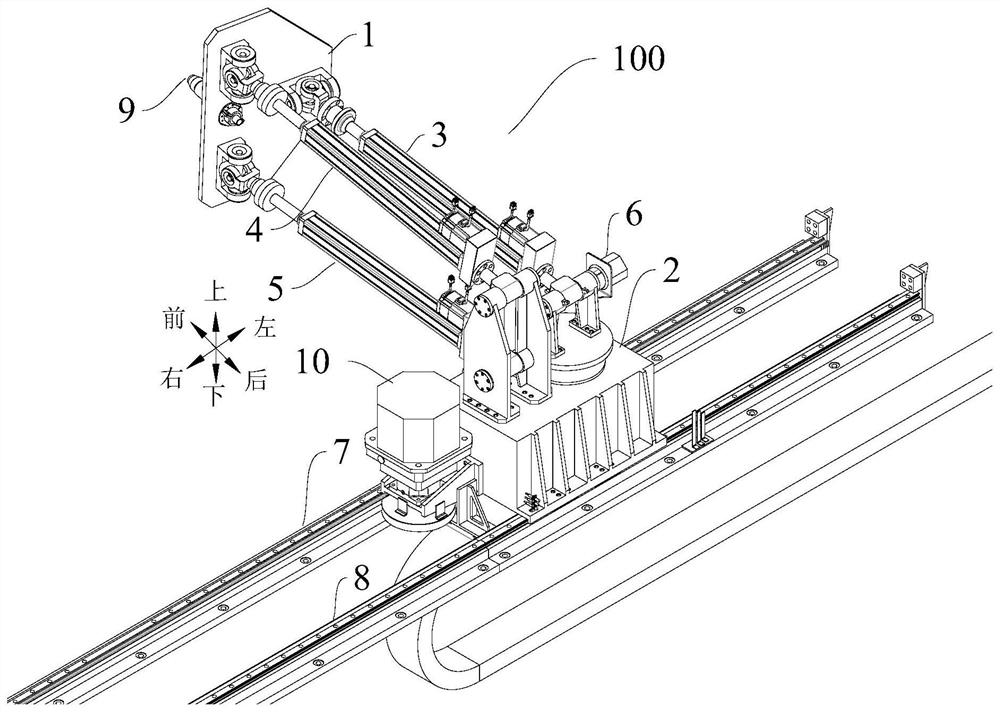
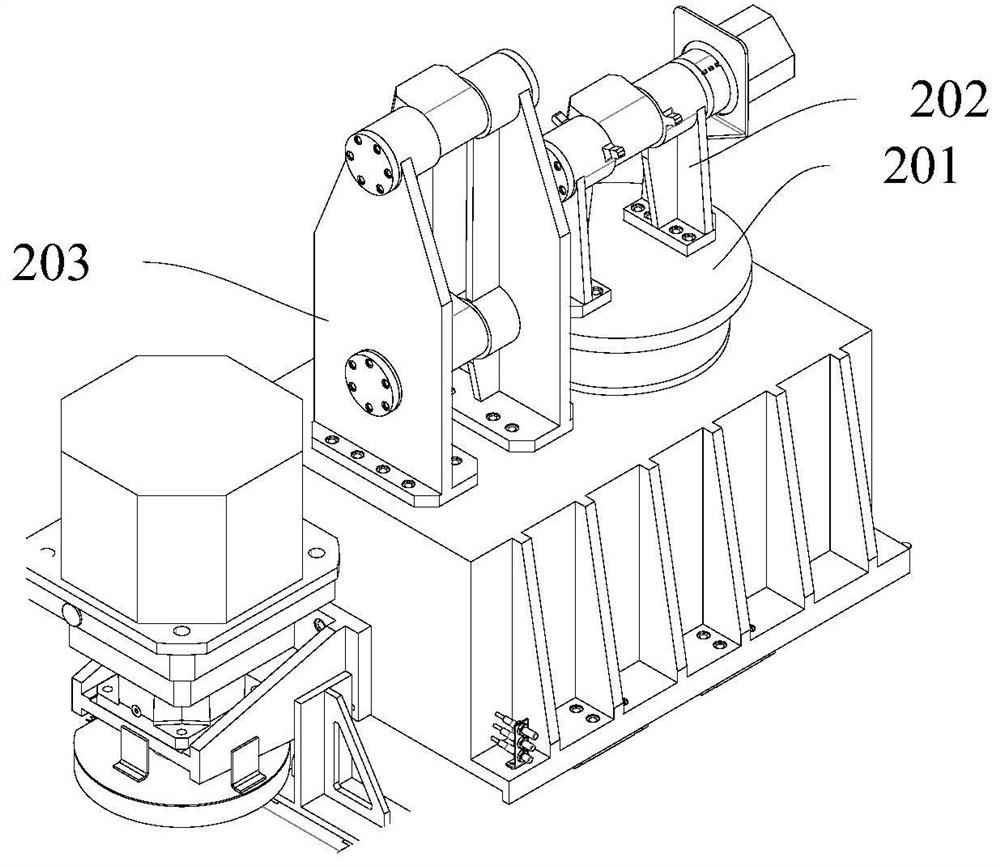
[0032] like Figure 1 to Figure 3 As shown, the four-degree-of-freedom parallel mechanism 100 according to the embodiment of the present invention includes a moving platform 1 , a mounting base 2 , a first telescopic rod 3 , a second telescopic rod 4 , a third telescopic rod 5 and a first motor 6 .
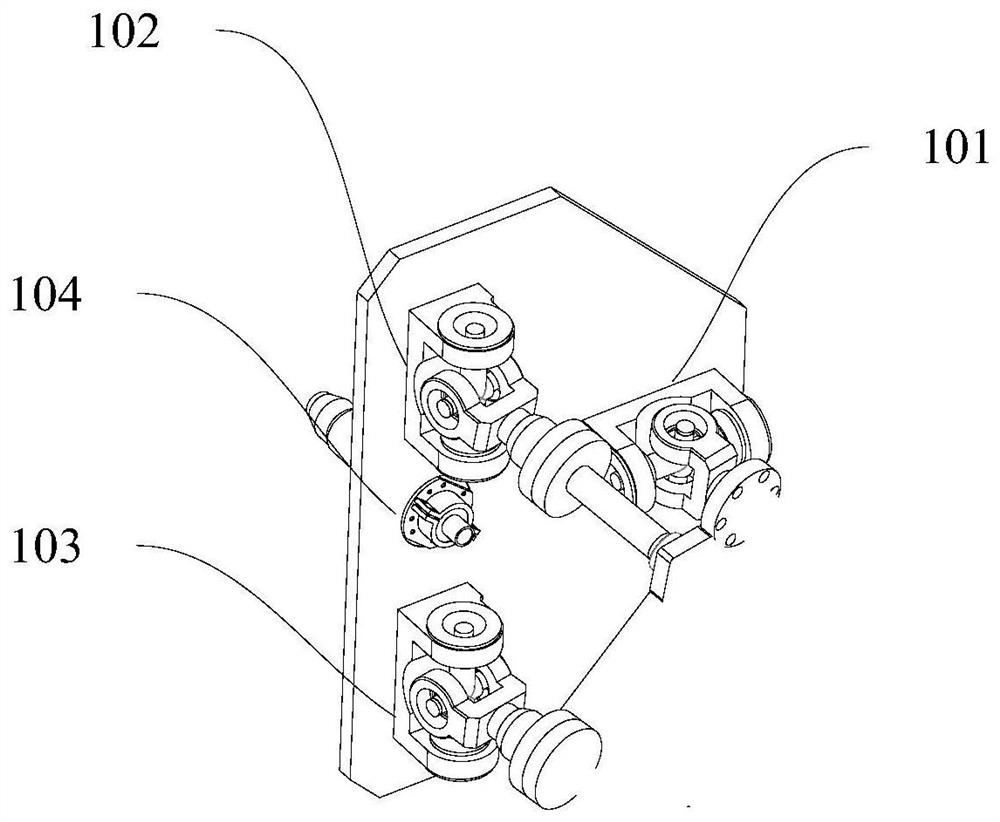
[0033] The movable platform 1 is provided with a mounting position 104 for mounting the work equipment 9 . like image 3 As shown, the movable platform 1 can be a flat plate, and the movable platform 1 is provided with installation holes for installing the working equipment 9 , and the installation holes constitute the installation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More