

Attitude correction method using speed measurement sensor in Mars landing process
A sensor and lander technology, used in the testing/calibration of velocity/acceleration/shock measuring equipment, instruments, measuring devices, etc., can solve the problem that the horizontal velocity cannot meet the index requirements during landing, and the inertial navigation extrapolation attitude error accuracy is reduced. , incomplete observability of the system, etc., to achieve the effect of improving reliability, improving vertical accuracy, and simple calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0032] A kind of Mars landing process utilizes the attitude correction method of velocity sensor, comprises the following steps:
[0033] 1) Inertial navigation gravitational direction estimation
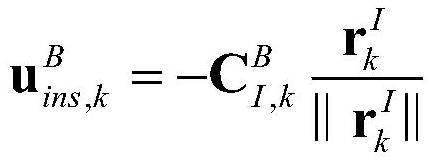
[0034] remember t k The inertial position, inertial velocity and attitude matrices obtained by time-to-time inertial navigation extrapolation are respectively Where the subscript k indicates that the state is t k The value at time, the superscript I indicates that the state is projected under the inertial system, is the attitude transformation matrix from the inertial system to the system. During landing, the direction of gravity and the position of the lander relative to the center of Mars are reversed if higher-order terms are not co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More